Local Search¶
约 1606 个字 27 行代码 10 张图片 预计阅读时间 8 分钟
Local Search是一种启发式算法,它从一个初始解开始,通过不断地在解空间中移动,直到找到一个局部最优解。Local Search的优点是它可以在大规模问题上找到一个较好的解,但是它的缺点是它可能会陷入局部最优解,而无法找到全局最优解。
from wiki
Local:我们定义neighborhood为一个解的集合,这个集合包含了所有与当前解相邻的解。local的含义是我们只考虑neighborhood中的解,而不考虑全局的解。
Search:我们定义一个评价函数,这个函数可以评价一个解的好坏。我们从一个初始解开始,然后不断地在neighborhood中搜索,直到找到一个局部最优解。
Vertex Cover¶
定义在NP的部分已经介绍过。不过在这里,我们讨论的是如何找到一个包含最少点的vertex cover。
在这个问题中:
-
初始解:所有点
-
评价函数(cost):cost(S) = |S|
-
Search:每次删除/增加一个点,检查剩下的图是否仍为一个顶点覆盖。
但是,局部搜索并不是一个确定性算法,它可能会陷入局部最优解。
Example
这里局部搜索是生效的,最后是一个空集。
这里局部搜索是无效的,取决于我们会不会删除中间那个点。

这里局部搜索是无效的,取决于我们会不会删除两端那个点。
按我个人感觉来看,单纯的局部搜索会不会陷入局部最优解,取决于解里面每个元素是不是同等地位的,如果不是的话,那删除的选择就会影响最后的结果。所以,我们不仅有删除点的操作,还有添加点的操作,来跳出局部最优解。
The Metropolis Algorithm¶
Metropolis Algorithm是一种模拟退火算法,它是一种局部搜索算法的变种。它的基本思想是,我们在搜索的过程中,有一定的概率接受一个比当前解更差的解,这样可以避免陷入局部最优解。
SolutionType Metropolis()
{ Define constants k and T;
Start from a feasible solution S FS ;
MinCost = cost(S);
while (1) {
S’ = Randomly chosen from N(S);
CurrentCost = cost(S’);
if ( CurrentCost < MinCost ) {
MinCost = CurrentCost; S = S’;
}
else {
With a probability $e^{- \Delta \text{cost} / KT}$ , let S = S’;
else break;
}
}
return S;
}
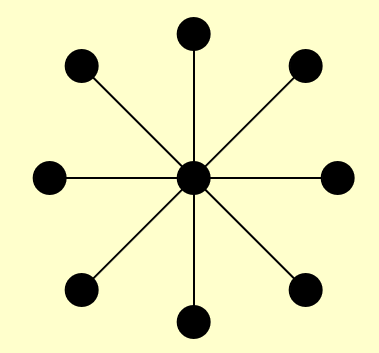
Hopfield Neural Networks¶
给定一个图G(V,E),它的边的权值是整数,但可以是负数。对于边(u,v),我们定义一个权值\(w_{uv}\)。若\(w_{uv} < 0\),则u,v希望是一样的状态(\(\pm 1\));若\(w_{uv} > 0\),则u,v希望是不一样的状态。用数学来描述,就是
其中\(S_u\)是u的状态,\(S_v\)是v的状态。
输出为一个全图所有点状态,使得所有的边都满足上述条件。然而,这样的要求很有可能做不到,例如一个三角形环,每条边都是正数。为此,我们定义边的权值的绝对值是the strength of the requirement,即我们希望这个边的要求是强的还是弱的。
Definition
-
好边:\(w_{u,v} S_u S_v < 0\)
-
坏边:\(w_{u,v} S_u S_v > 0\)
-
点被满足(satisfied):包含该点的所有边加起来,好边权重大于等于坏边权重
\[\sum_{v \in N(u)} w_{u,v} S_u S_v \leq 0\] -
Stable configuration:所有点都被满足
State-flipping Algorithm¶
ConfigType State_flipping()
{
Start from an arbitrary configuration S;
while ( ! IsStable(S) ) {
u = GetUnsatisfied(S);
s_u = - s_u;
}
return S;
}
问题来了,我们是否总能找到一个stable configuration呢?
答案是可以。首先我们可以发现,State-flipping Algorithm必然会导致好边的权重增加,然而,总权重是有上限的,因此在调整必然会terminate,而且是在有限步内,也就是说,我们总能找到一个stable configuration,并且最多花费\(\sum_{w \in E} |w|\)步。
然而,解法的时间复杂度也不是多项式级别的。
The Maximum Cut Problem.¶
给定一个图 G(V, E),我们希望将顶点集 V 分成两个子集 A 和 B,使得连接 A 和 B 的边的权重总和最大。
这个问题也可以转换为一个Hopfield Neural Networks问题。
-
定义所有边的权值大于0.
-
集合A内的点状态均为-1.
-
集合B内的点状态均为1。
这样,我们就可以将这个问题转换为一个Hopfield Neural Networks问题。集合内的边都是坏边,集合间的边都是好边。而我们的调整,就是将一个不满足的点从一个集合移动到另一个集合,也就是上面的State-flipping Algorithm。这样会让好边的权重增加,坏边的权重减少,最终找到一个最大值。
How good is this local optimum?¶
结论:
设 (A, B) 是一个局部最优划分,设 \(w(A^*, B^*)\) 是一个全局最优划分。那么 \(w(A, B) \geq \frac{1}{2}w(A^*, B^*)\)。
Big-improvement flip
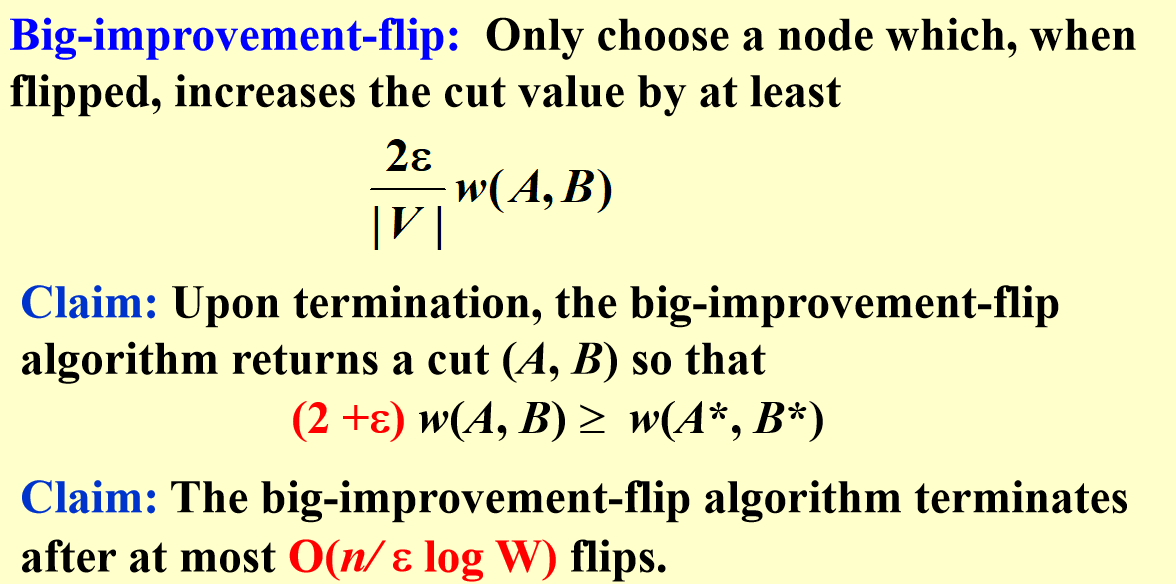
Try a better local?¶
当局部搜索时,邻域应该足够丰富,以避免陷入不理想的局部最优;但邻域不宜过大,因为我们希望能够高效地搜索可能的局部调整。
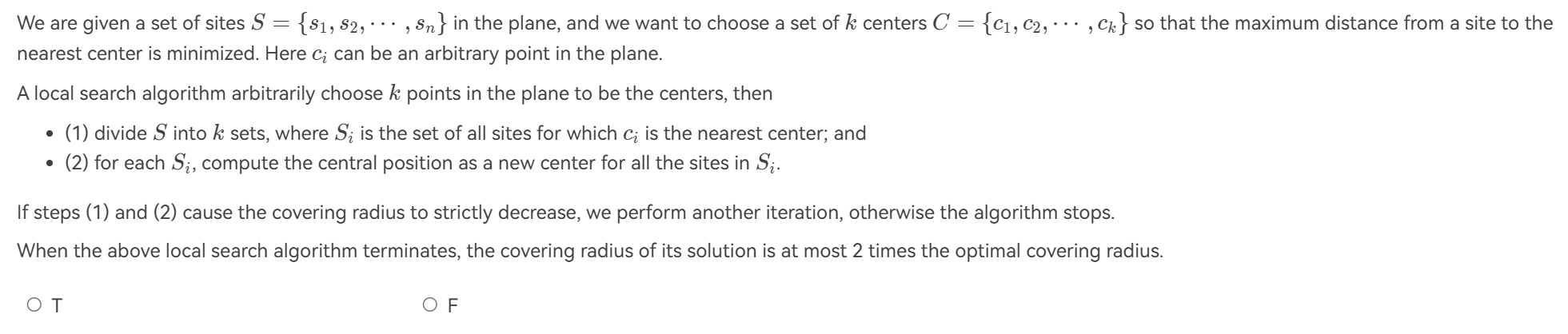
例题¶
例题

解析
T.删除了图中这个黑色的点后,很显然只能删掉最下面两个点,保留了中间的点,因此是最优的。
解析
F.反例见此
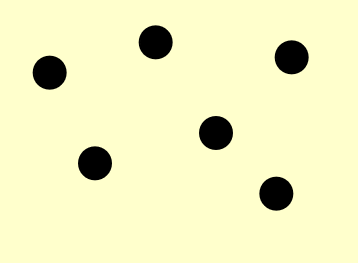
其实,这里的局部搜索的问题就在于它可能会将两个很近的点划分到不同的set当中,因为一开始的\(c_i\)是随机落点的,所以这个问题是有可能发生的。而这种情况得到的距离肯定是远大于最优解的。
设想有一个长方形,长边无限长,短边无限短,四个点分别在四个角上,很显然最优解的圆心肯定在短边上,但如果一开始的随机的圆心落到了长边的中点,那就寄了。

解析
T.search space与neighborhood不同,search space指的是所有可能的解,而neighborhood指的是与当前解相邻的解。SAT问题中,N个变量,每个可以取0或1,那么search space就有\(2^N\)个解.N-Queens问题中,每个皇后可以放在N个位置,那么search space就有\(N^N\)个解。
解析
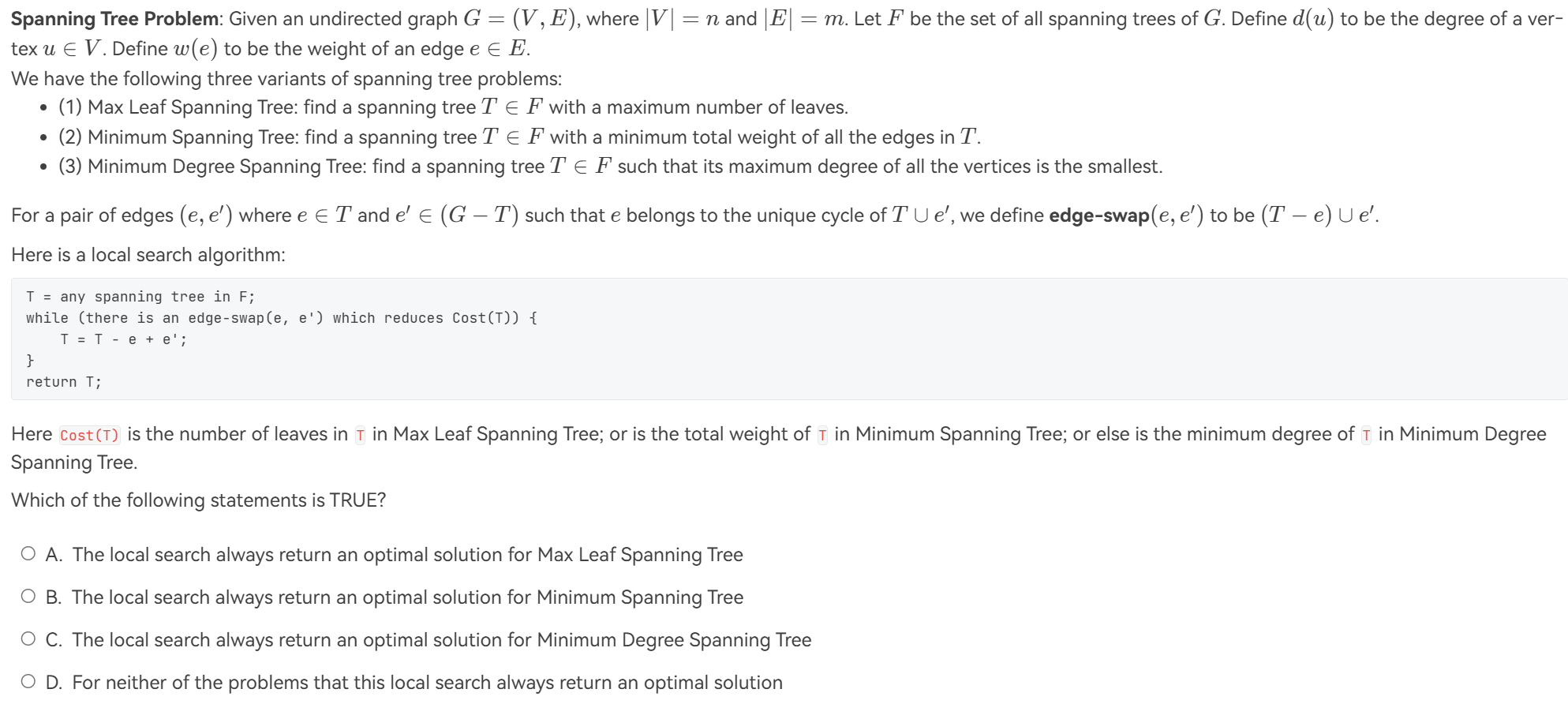
B.没有太看懂,但是我感觉Max Leaf Spanning Tree和Max Degree Spanning Tree的cost[T]定义的是不是有问题?题目里说的是向cost[T]减小的方向走。
解析
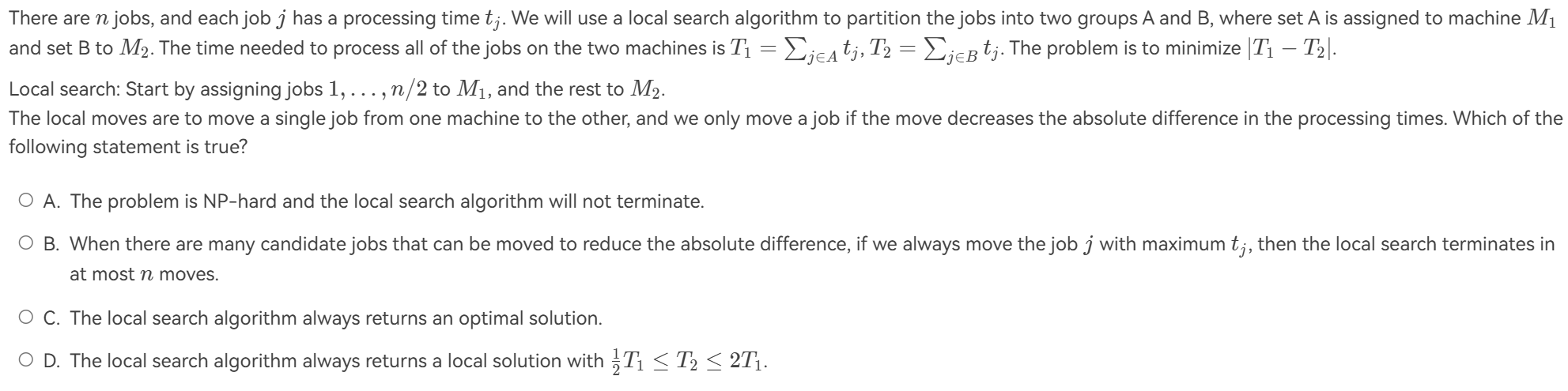
A:每次操作都会导致dif减小,然而dif最小是0,因此肯定会终止,故错误。
B:正确,移过去的不会再移回来,因此最多n次。
C:考虑{1,2,3,4,5}={1,2,3}+{4,5}.理论最优解是{1,2,5}+{3,4},dif=1.然而局部搜索移动时,完全动不了,因为不管移哪个都违背了"we only move a job if the move decreases the absolute difference",也就是说,局部搜索太短视了,看不到暂时的牺牲为了长远的利益。
D:错误。考虑{1,2,100}={1,2}+{100}

解析
见上图结论