指令级并行¶
约 7807 个字 72 行代码 24 张图片 预计阅读时间 40 分钟
-
比赛预测器
-
Tomasulo算法
开头流水线在前面学过了...
在计组中我们学习的指令都是整数指令,实际上,对于浮点指令(FP),流水线需要做一些小改动。
Latency&Interval
-
Latency:the number of intervening cycles between an instruction that produces a result and an instruction that uses the result(在产生结果的指令和使用结果的指令之间的周期数)
-
Interval: the number of cycles that must elapse between the issue of two consecutive instructions(两条连续指令之间必须经过的周期数)
在处理浮点数时,我们把EX阶段分为多种:
-
处理浮点数加法
-
处理浮点数乘法
-
处理浮点数除法
-
不处理浮点数
在这之中,乘法和加法是可以采取流水线的方式来处理的,也就是说,后一条指令并不需要前一条指令离开EX阶段才能进入EX阶段。
Out of order Completion
对于如下指令:
由于除法指令执行需要的时间久,因此加法和减法会在除法做完之前做完,也就是出现了乱序的现象。
对于乱序,我们可以采取如下做法
-
如果像上面这样指令之间不存在依赖,那么可以直接忽视
-
把后完成的指令的结果存到一个buffer里面,等到前面的指令完成后再写回去。
-
记录流水线中的指令与它们的PC值,以便处理异常
-
只有当一条指令前面的指令都处理完且没发生异常时,才处理这条指令
ILP exploitation¶
ILP exploitation
ILP exploitation(指令级并行性利用)是指通过编译器和硬件的配合来提高指令级并行性。
-
Compiler-based static parallelism:编译器在编译时分析指令之间的依赖关系,并将可以并行执行的指令进行调度。
-
Hardware-based dynamic parallelism:硬件在运行时动态分析指令之间的依赖关系,并将可以并行执行的指令进行调度。
什么样的指令可以并行呢?
如果两条指令一起执行时不会有stall,不会引起结构冒险,这两条指令就是可以并行的。
不然,我们称这些指令是有依赖的,即Dependant Instructions。
Dependence¶
Data Dependence(数据依赖)¶
数据依赖是指两条指令之间存在数据传递关系,即一条指令的输出结果作为另一条指令的输入。典型的数据依赖就是:
- Read After Write (RAW): 也称为真实依赖,表示第二条指令需要读取第一条指令的结果。
- 在上面的例子中,第二条指令需要读取第一条指令的结果r1,因此它们之间存在数据依赖关系。
总的来说,如果指令j不与指令i有数据依赖关系,那么下面的情况都不能出现:
-
指令j需要指令i的结果
-
指令j数据依赖指令k,指令k数据依赖指令i
Name Dependence(名称依赖)¶
名称依赖是指两条指令之间存在名称冲突,即它们使用了相同的寄存器或内存地址,但实际上它们之间并没有数据传递关系。
典型的名称依赖有以下两种:
-
WAR(Write After Read): 也称为反依赖(Antidependence),即后一条指令写入了一个寄存器或内存地址,而前一条指令读取了这个寄存器或内存地址。
- 这两条指令实际上没有数据依赖关系,但是它们执行的顺序不能交换,因为第二条指令会覆盖第一条指令的结果。
-
WAW(Write After Write): 也称为输出依赖(Output Dependence),即两条指令都要写入同一个寄存器或内存地址。
- 同样,这两条指令没有数据依赖,但不能交换顺序.
要解决名称依赖的问题,我们可以采取如下措施:
- Register Renaming:把寄存器重命名为不同的寄存器,这样就可以避免名称依赖的问题。
Control Dependence(控制依赖)¶
控制依赖是指两条指令之间存在控制关系,即一条指令的执行结果影响了另一条指令的执行。
在上面的例子中,第二条指令的执行结果取决于第一条指令的执行结果,因此它们之间存在控制依赖关系。
这与我们计组学的Control Hazard是一样的。
Static Scheduling(静态调度)¶
Static Scheduling 解释 from claude
静态调度是指在编译时分析指令之间的依赖关系,并将可以并行执行的指令进行调度。
-
优点:编译器可以根据指令之间的依赖关系进行调度,从而提高指令级并行性。
-
缺点:编译器无法动态分析指令之间的依赖关系,因此可能会导致一些指令无法并行执行。
静态调度就像是一个精心设计的交通管制系统,但这个系统是在"道路建设完成"之前就已经规划好的。
想象编译器是一位交通规划师,它在程序执行前(编译时)就需要规划好所有"车辆"(指令)的行驶路线:
-
提前规划路线:编译器会提前查看整个代码,就像交通规划师查看城市地图,找出哪些指令可以并行执行。
-
避开"堵车点":编译器会识别指令间的依赖关系(如RAW、WAR、WAW依赖),就像规划师避开可能的交通拥堵点。
-
固定的交通灯设置:一旦编译完成,指令执行的顺序就像被固定的交通灯时序一样,不会根据实际运行情况做出调整。
实例分析:
静态调度分析:
-
指令1和指令2之间没有依赖,可以并行执行
-
指令3依赖于指令1和指令2的结果,必须等它们完成后才能执行
编译器会生成调度计划:先并行执行指令1和指令2,再执行指令3。这种规划是基于编译时的"理想情况"做出的最佳安排,但无法应对运行时的意外情况,如缓存未命中或分支预测错误。
静态调度有两种方法:
-
Pipeline Scheduling:流水线调度
-
Loop Unrolling:循环展开
我们以接下来这段程序为例介绍。
它的RISC-V指令如下:
Loop: fld f0,0(x1) // load x[i] into f0
fadd.d f4,f0,f2 // f0 = x[i] + s
fsd f4,0(x1) // store f0 into x[i]
addi x1,x1,-8 // i--
bne x1,x2,Loop // if i != 0, jump to Loop
Pipeline Scheduling(流水线调度)¶
观察上面的汇编指令,我们发现前三条指令都存在数据依赖关系。
如果就这样执行的话
-
fld指令和fadd.d指令之间需要一个周期的stall(考虑forwarding) -
fadd.d指令和fsd指令之间需要两个周期的stall
这样,跑一个循环就要八个周期.
如果我们把指令顺序调整为
Loop: fld f0,0(x1) // load x[i] into f0
addi x1,x1,-8 // i--
fadd.d f4,f0,f2 // f0 = x[i] + s
fsd f 8(x1) // store f0 into x[i]
bne x1,x2,Loop // if i != 0, jump to Loop
在这样的情况下,fld和fadd.d之间就不用停了,因为这一个周期拿来执行无关的指令了,现在只需要在fadd.d和fsd之间停两个周期就行了.
跑一个循环从八个周期变成了七个周期,加快了速度.
然而,现在还存在一个问题.在一个循环中,真正对数据作操作的就只有fld,fadd.d和fsd三条指令,五条指令只有三条在干活,这不符合我们的设计.
因此,引入了Loop Unrolling(循环展开).
Loop Unrolling(循环展开)¶
我们把用于循环的语句开销称为Loop Overhead(循环开销),它包括:
-
计算循环条件的开销
-
更新循环变量的开销
-
跳转的开销
我们的目的就是降低这个开销,也就是提高干活指令的比例.
我们直接把循环展开四次:
Loop: fld f0,0(x1) // load x[i] into f0
fadd.d f4,f0,f2 // f0 = x[i] + s
fsd f4,0(x1) // store f0 into x[i]
fld f6,-8(x1) // load x[i-1] into f6
fadd.d f8,f6,f2 // f6 = x[i-1] + s
fsd f8,-8(x1) // store f6 into x[i-1]
fld f10,-16(x1) // load x[i-2] into f10
fadd.d f12,f10,f2 // f10 = x[i-2] + s
fsd f12,-16(x1) // store f10 into x[i-2]
fld f14,-24(x1) // load x[i-3] into f14
fadd.d f16,f14,f2 // f14 = x[i-3] + s
fsd f16,-24(x1) // store f14 into x[i-3]
addi x1,x1,-32 // i--
bne x1,x2,Loop // if i != 0, jump to Loop
这样,平均每个循环耗时6.5个周期.
💡 性能优化新挑战
但是还不过瘾!我们想要更进一步,怎么做?
我们可以再进行重排来减少周期数。
Loop: fld f0,0(x1) // load x[i] into f0
fld f6,-8(x1) // load x[i-1] into f6
fld f10,-16(x1) // load x[i-2] into f10
fld f14,-24(x1) // load x[i-3] into f14
fadd.d f4,f0,f2 // f0 = x[i] + s
fadd.d f8,f6,f2 // f6 = x[i-1] + s
fadd.d f12,f10,f2 // f10 = x[i-2] + s
fadd.d f16,f14,f2 // f14 = x[i-3] + s
fsd f4,0(x1) // store f0 into x[i]
fsd f8,-8(x1) // store f6 into x[i-1]
fsd f12,-16(x1) // store f10 into x[i-2]
fsd f16,-24(x1) // store f14 into x[i-3]
addi x1,x1,-32 // i--
bne x1,x2,Loop // if i != 0, jump to Loop
这样,我们用有用的指令代替了stall,所以完全不需要停了.
四个循环一共用了14个周期,平均每个循环3.5个周期,提升可以说非常大了.
Dynamic Branch Prediction(动态分支预测)¶
1 bit predictor(1位预测器)¶
用一个位来表示分支是否被预测为taken,如果是,就用1表示,如果不是,就用0表示.
如果当前预测的结果和实际结果相同,就不需要更新,如果不同,就更新.
相当于一个只有两个状态的有限状态机.
这个方法对于“摇摆"的分支预测效果会很糟糕,比如taken和not taken交替出现的情况。
在这个情况下,我们思考2bit预测器的设计。
2 bit predictor(2位预测器)¶
2bit预测器使用两个位来表示分支的状态,分为四种状态:
-
00: strongly not taken(强不跳转)
-
01: weakly not taken(弱不跳转)
-
10: weakly taken(弱跳转)
-
11: strongly taken(强跳转)
强弱在这里其实没有特别的含义,与1bit预测器的主要区别就是,2bit预测器需要两次错误才能改变预测状态
┌───────────┐ ┌─────────────┐
│ │ taken │ │
│ 00 ├────────►│ 01 │
│ 强不跳转 │ │ 弱不跳转 │
│ │◄────────┤ │
└───────────┘not taken└─────┬───────┘
│ ▲
│taken | not taken
▼ |
┌───────────┐ ┌─────────────┐
│ │ taken │ │
│ 11 │◄────────┤ 10 │
│ 强跳转 │ │ 弱跳转 │
│ ├────────►│ │
└───────────not taken └─────────────┘
Branch Target Buffer(BTB)(分支目标缓冲器)¶
BTB中放置了分支指令的PC地址和目标地址,当我们遇到分支指令时,就可以直接从BTB中找到目标地址。
-
工作原理
-
预存储分支信息:BTB存储了分支指令的PC地址和对应的目标地址的映射关系
-
提前获取目标:处理器遇到分支指令时,不必等到指令解码阶段才知道跳转目标,而是可以直接查询BTB
-
预取指令:处理器可以根据BTB中的信息提前从目标地址获取指令,大大减少分支指令带来的流水线停顿
-
-
BTB的结构
BTB通常实现为一个缓存结构:
分支指令地址 目标地址 预测信息 0x1000 0x2000 Taken 0x1200 0x1500 Not Taken ... ... ... -
实际应用过程
-
IF阶段:处理器获取指令并检查该地址是否在BTB中
-
命中时:如果命中且预测为taken,处理器直接从目标地址获取下一条指令
-
未命中时:继续顺序执行,并在确认为分支指令后更新BTB
-
预测错误:如果分支预测错误,处理器清空流水线并从正确的地址重新取指令
-
Tournament Predictor(比赛预测器)¶
Todo...
Dynamic Scheduling(动态调度)¶
-
允许指令乱序执行
-
将流水线的
ID阶段分为两个阶段:-
Issue阶段:指令解码,检查有没有结构冒险 -
Read Operands阶段:一直等待,直到没有数据冒险后,读取操作数 -
因此现在的五级流水线实际上是:
-
IF:取指令
-
ID:指令解码
-
Issue:发射指令
-
Read Operands:读取操作数
-
EX:执行指令
-
WB:写回结果
-
-
注意
乱序执行只指在EX阶段乱序执行,在IF取指阶段还是要按顺序取指.
因此我们的调度策略是:
-
一旦有一条指令stall了,把其他可用的指令发射.
-
"可用"指该条指令不依赖任何正在执行的指令或是前面Stall的指令.
为了实现这个调度策略,我们介绍如下两种算法.
Scoreboard Scheduling(记分板调度)¶
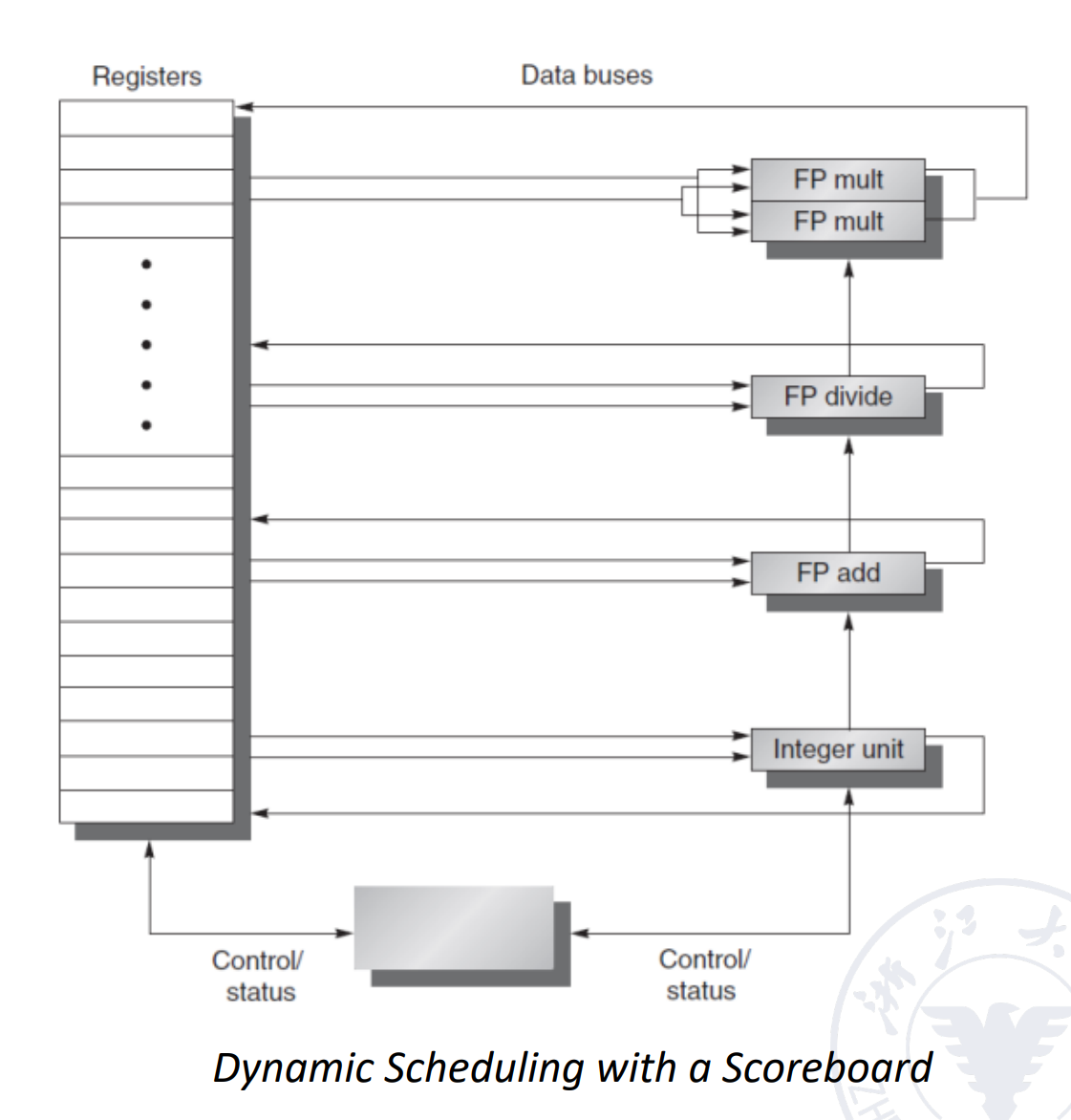
所谓Scoreboard,就是在寄存器与功能单元(如整数加法器、浮点乘法器等)之间加一个表格,用来各种情况,并发出调度的信号.
它由如下三部分,也可以当作是三个表格组成:
-
Instruction Status Table:指令状态表,跟踪当前正在处理的每条指令。记录每条指令所处的阶段与要求的功能单元。
-
Functional Unit Status Table:功能单元状态表
-
Register Result Table:寄存器结果表,用来记录寄存器的状态
1. Instruction Status Table(指令状态表)¶
指令状态表声明指令所处的状态,包括:
-
issue -
read operands -
execution -
write back
我们这里忽略了内存访问,是因为在乱序执行中,我们更关注浮点指令的执行,因为它们的用时比整数指令长.而
ld/sd可以认为是整数指令.
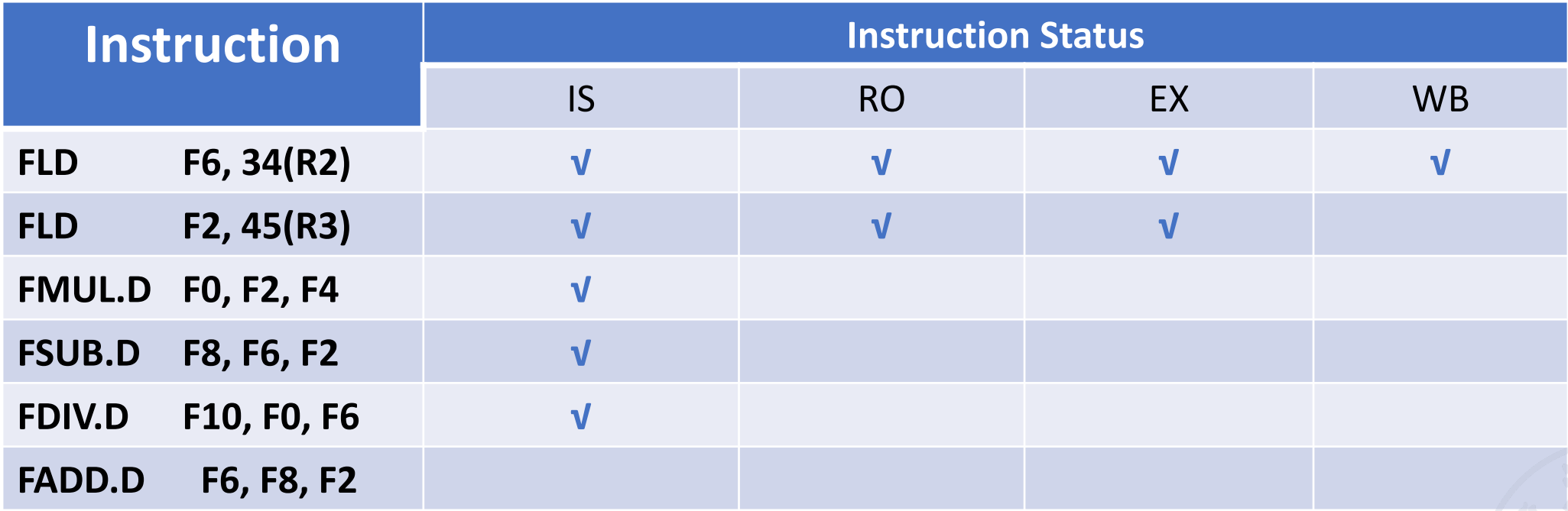
Instruction Status Table
2. Functional Unit Status Table(功能单元状态表)¶
典型的状态表如下:
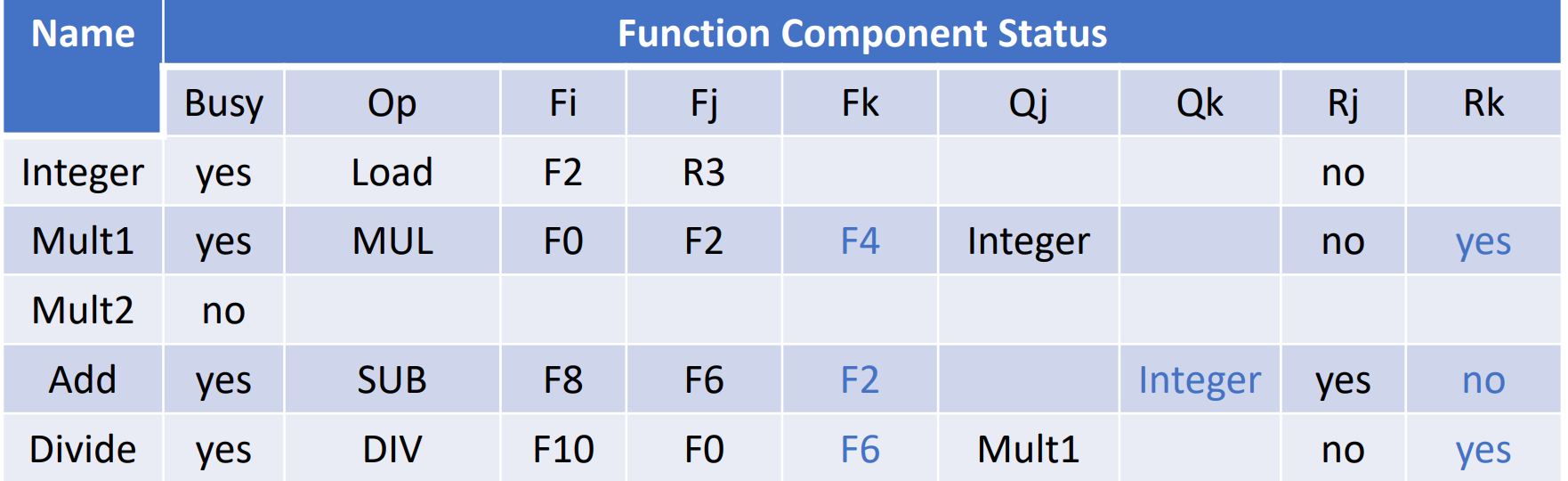
Functional Unit Status Table
一个功能单元的状态由如下9个字段表明:
-
busy:表示该功能单元是否正在使用 -
op:表示该功能单元正在执行的操作,如加法、乘法等 -
Fj,Fk(源寄存器): 指令的源寄存器。 -
Fi(目标寄存器): 指令的目标寄存器。 -
Qj,Qk: 表示源寄存器的值来自哪个功能单元。 -
Rj,Rk: 表示源寄存器是否准备好。在Read Operands后,Rj和Rk会被重置为No.
3. Register Result Table(寄存器结果表)¶

Register Result Table
这张表很简单,就是声明某个寄存器会被哪条活跃的指令写入,如果没用到,则设置为空.
工作流程详解¶
-
在
Issue阶段,Scoreboard检查指令需要使用的功能单元是否空闲,如果空闲,且不存在WAW冒险,就把指令发射,同时,更新上面这三张表:-
WAW(Write After Write): 检查是否有更早发射但尚未完成写回的指令,也打算写入当前指令的目的寄存器Fi。这可以通过检查寄存器结果状态表:如果RegResult[Fi]不等于当前指令所在的功能单元,说明有其他单元将写入Fi,并且它的指令是先发射的. -
更新指令状态表,将该指令标记为 Issue 阶段。
-
更新功能单元状态表中对应功能单元的条目,标记其为 Busy,并记录操作类型 (Op)、目的寄存器 (Fi) 和源寄存器 (Fj, Fk)。
-
更新寄存器结果状态表,标记 Fi 寄存器将由该功能单元写入。
-
-
在
Read Operands阶段, 检查是否存在 RAW 冒险(真数据依赖)。即,指令的源操作数是否就绪。操作数就绪的条件是:-
操作数已经存在于寄存器中且
-
没有之前发射但尚未完成的指令会写入该源寄存器(通过检查寄存器结果状态表:如果
RegResult[源寄存器]为空,则表示没有正在计算该寄存器值的未完成指令)
-
-
在
Execution阶段, 功能单元执行指令。经过一定周期,完成执行后,进入下一阶段 -
在
Write Back阶段, 检查是否存在WAR:-
WAR(Write After Read): 检查是否有 更早 发射但 尚未读取源操作数 的指令,其源操作数是当前指令将要写入的目的寄存器Fi。Scoreboard需要检查功能单元状态表中所有其他之前未完成指令的Fj/Fk字段,看是否有等于Fi的,并且其Rj/Rk标记仍为No。 -
如果不存在WAR冒险,指令将结果写回目标寄存器,同时:
-
更新指令状态表。
-
更新功能单元状态表中对应功能单元的条目,标记其为不忙碌 (Busy = No)。
-
同时,通知所有正在等待这个结果作为源操作数的其他指令,它们的操作数已就绪(在各自的功能单元状态表中更新
Qj/Qk并设置Rj/Rk为Yes)。
-
-
例子
以这篇知乎文章中的例子展开.
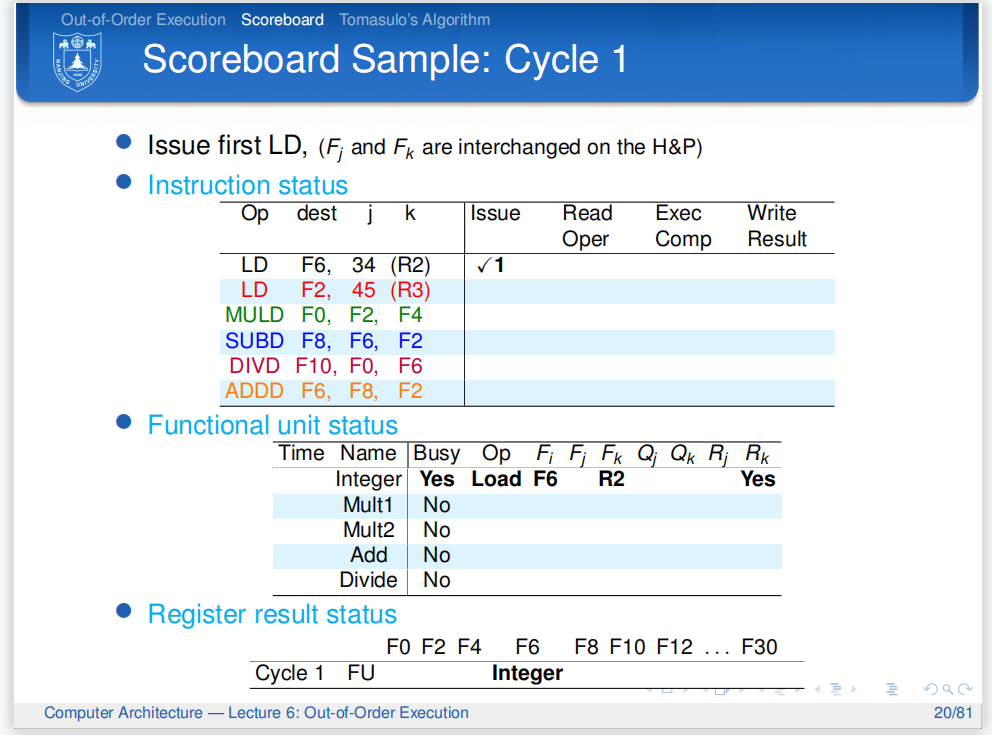
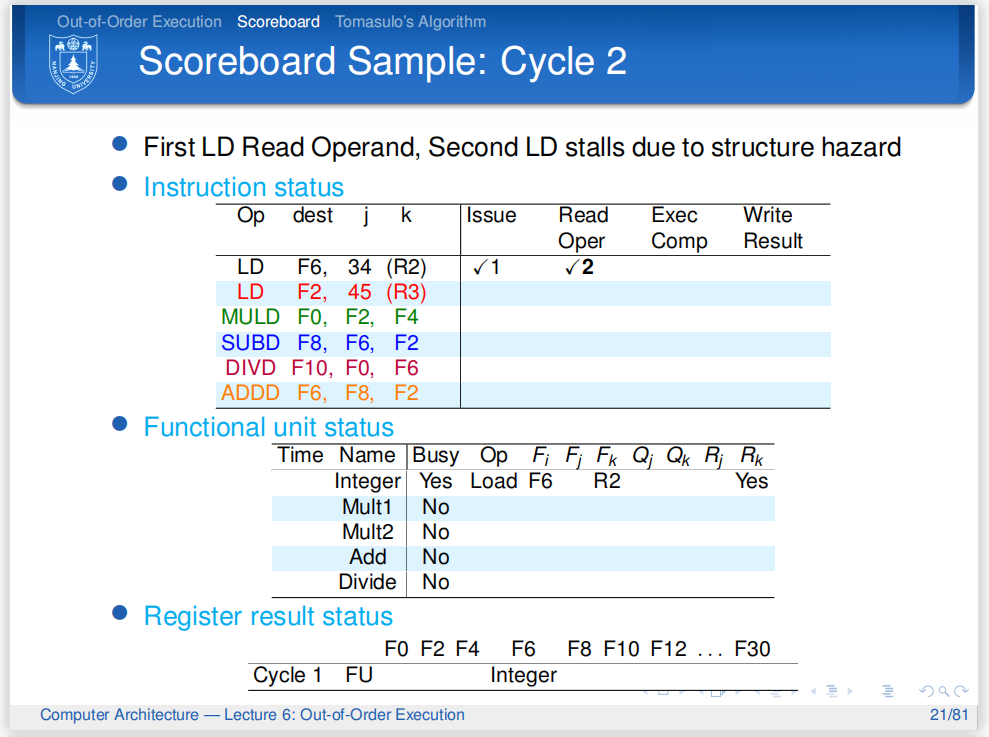
第一个周期,大家都很空,于是第一条指令顺利发射了:)
同时更新了计分板信息.
第二条指令也是ld指令,因为检测到整数单元还在处理第一条指令,所以不能发射,也不更新计分板
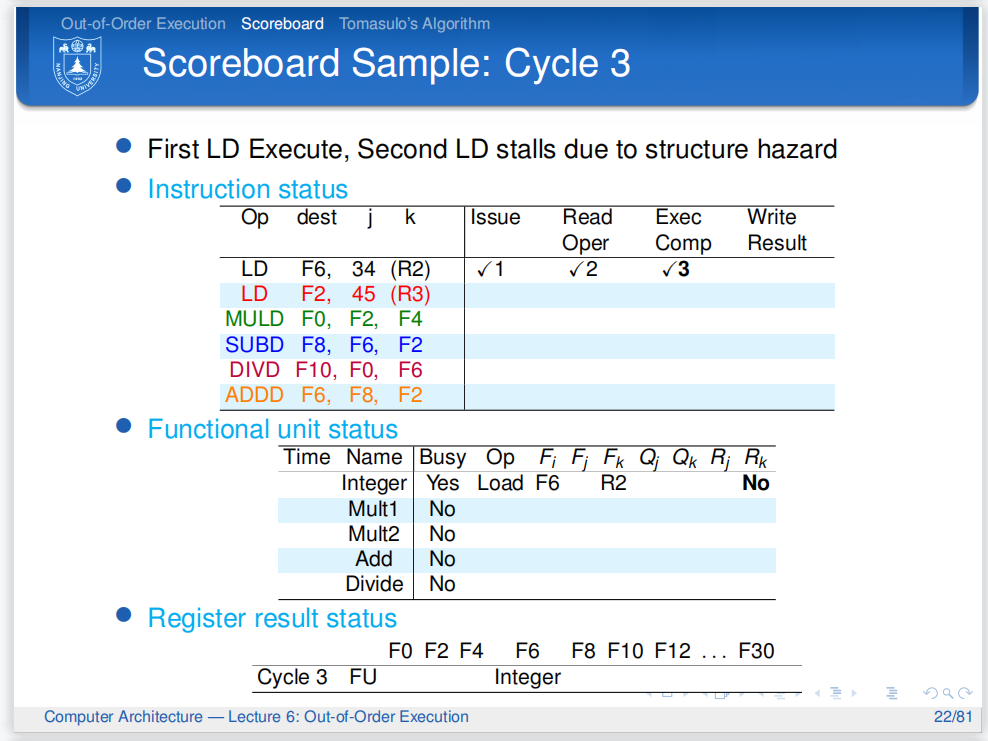
因为第二条指令阻塞了,所以第三条指令也不能发射.
但此时,第一条指令完成了Read Operands,所以Rk被重置为No,并且更新了计分板.
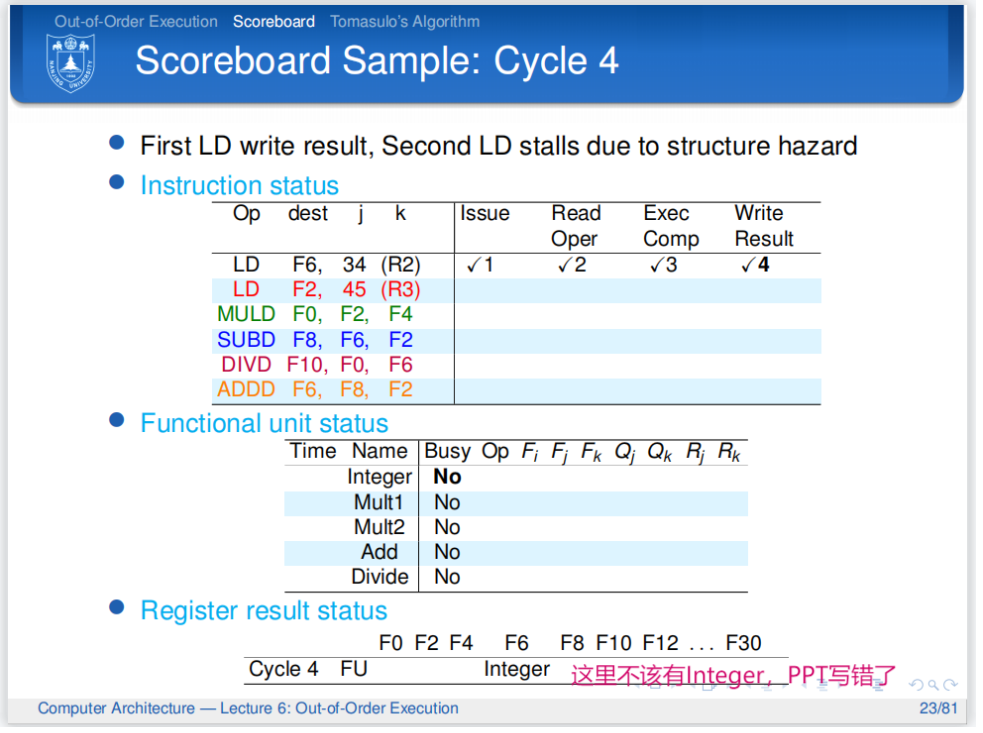
依然阻塞...但第一条指令现在要写回了,并且由于它是第一条指令,所以写回不会有什么WAR和WAW冒险.解放了整数单元
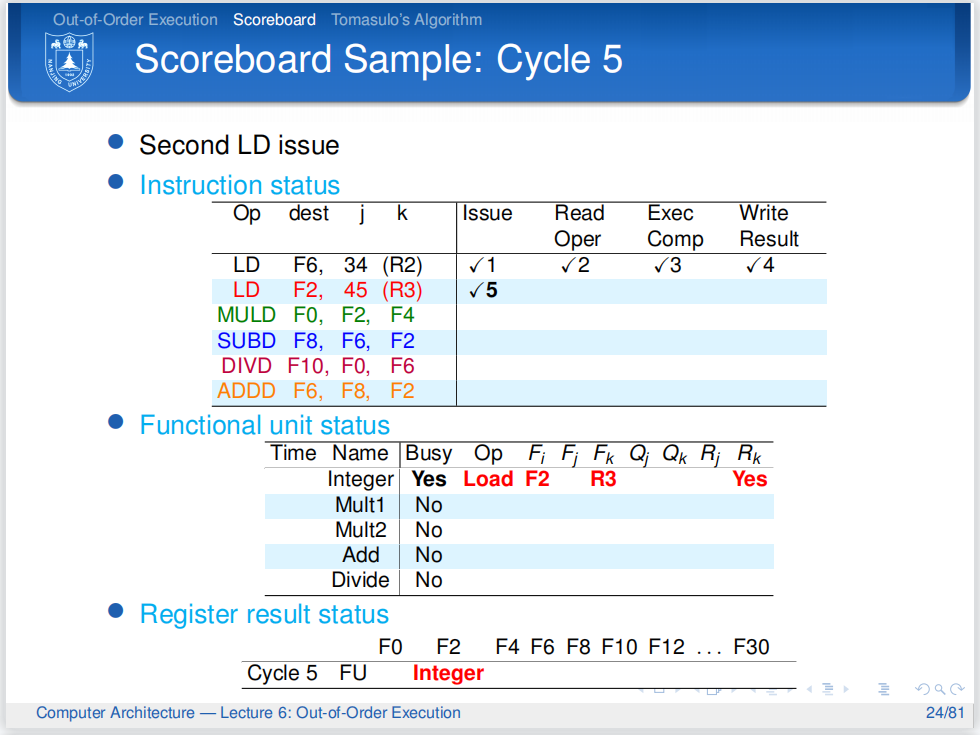
第二条指令终于可以发射了,并且更新了计分板.
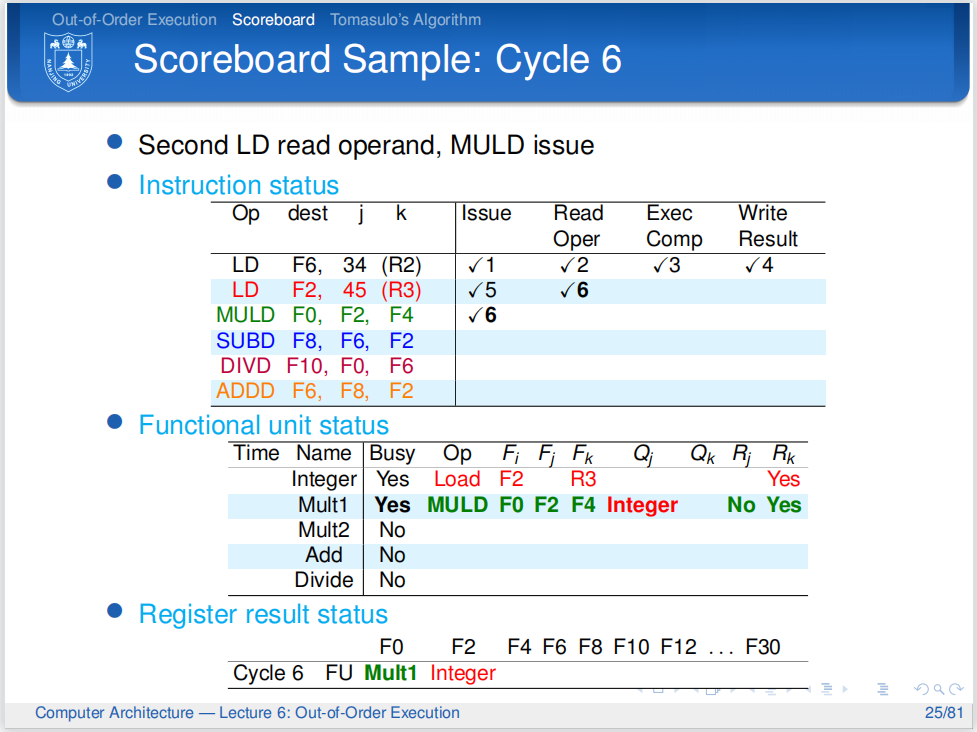
乘法单元是空闲的,所以第三条指令可以顺利发射,而第二条指令在Read Operands阶段也是没有什么问题的.但Scoreboard检测到第三条指令的Fj是和第二条指令的Fi相同的,所以第二条指令的Rj被设为No,它不准进入下一环节.
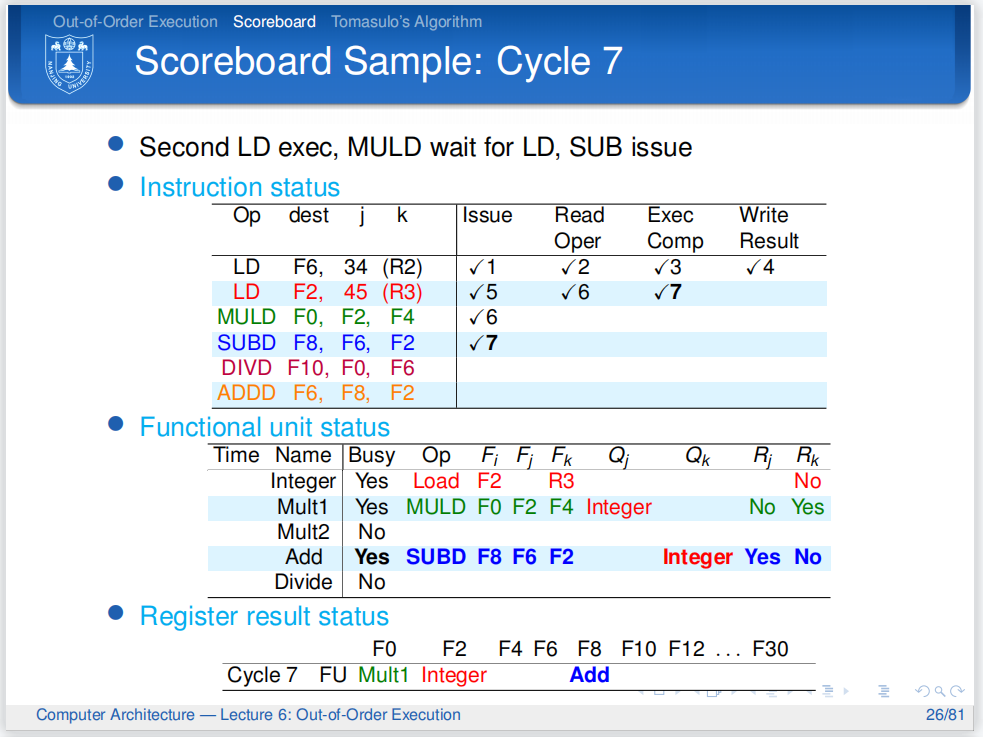
第七个周期,加法单元空闲,所以可以发射第四条指令.第三条指令被卡住,第二条指令顺利执行.
但可以发现,第四条指令的Fk和第二条指令的Fi是一样的,所以它也被标记了,卡住!
周期结束时,第二条指令改写计分板,改写 Rk为No
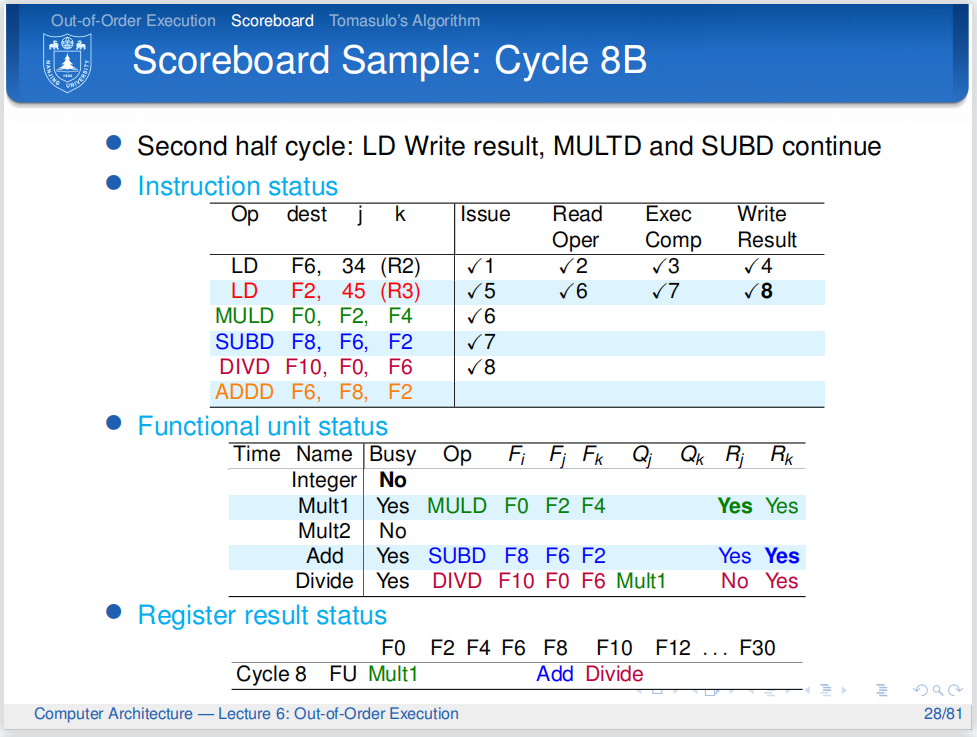
第八个周期,因为除法部件空闲,所以第五条指令可以发射.第三、四条指令因为有数据依赖,被卡住,而第二条指令顺利写回.
然而,第五条指令要用到第三条指令的Fi,因此它被标记了.
在周期的最后,LD 将数据写回寄存器堆,更新:
-
将寄存器表中的
F2设为blank -
第三、四条指令的
Rj,Rk全部是Yes了,它们在下一个周期可以执行.
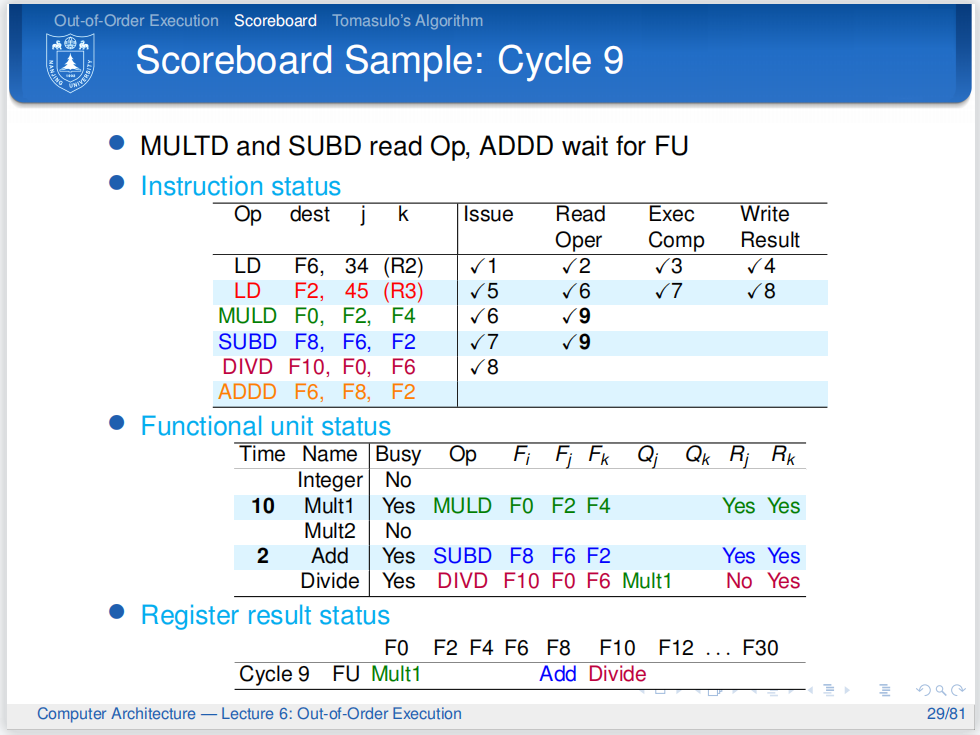
第六条指令要用到加法单元,但它现在被第四条指令占用,所以无法发射.第三、四条指令进入Read Operands阶段并完成。
Mult1 后面的10和Add后面的2告诉我们从下一周期开始,乘法和加法将要开始各自的计算,其分别需要10个周期、2个周期。
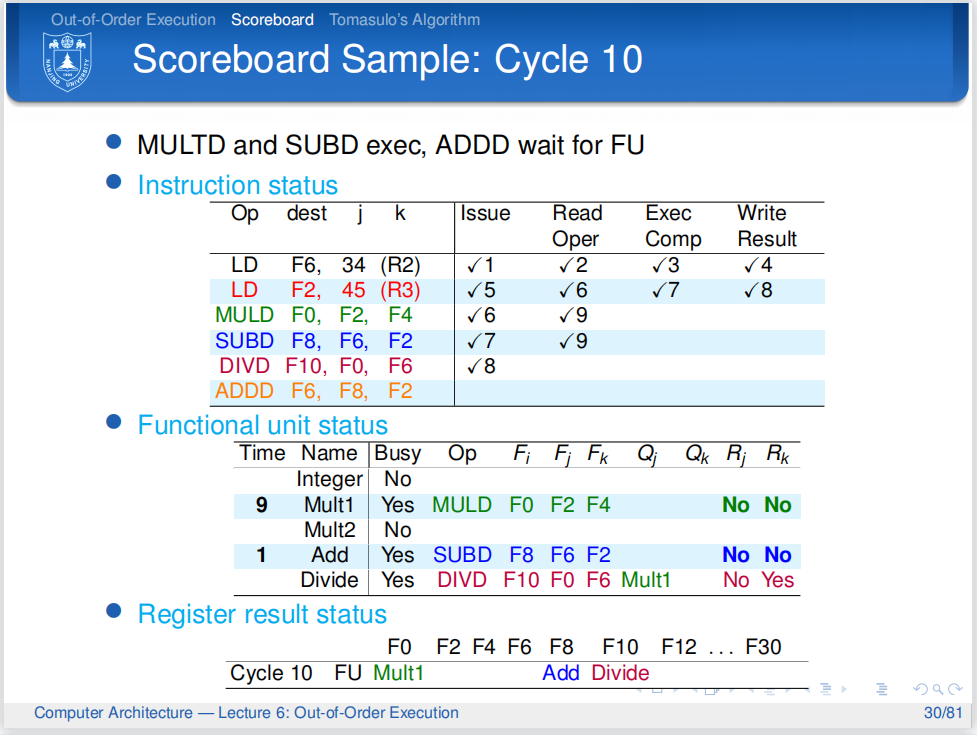
第十个周期,第五条除法指令还在等待寄存器值。第三、四条指令继续执行
后面基本没什么问题,不写了。
Tomasulo Algorithm(托马斯洛算法)¶
Why we need Tomasulo Algorithm?
为了回答这个问题,我们必须思考,Scoreboard调度的局限性是什么?
最主要的局限就是,Scoreboard为了解决WAR,WAW这种假的数据冒险时,也通过暂停流水线来避免问题,然而,这会导致性能下降。
比如
这样的WAW冒险,如果我们用Scoreboard调度的话,就会暂停流水线,直到第一个ADD指令完成写回。
实际上,如果我们把第二条指令以及后面的指令中的R3重命名为R7,就可以避免这个问题。
Tomasulo通过寄存器重命名等方法,让处理器遇到WAW与WAR时不会暂停。
Tomasulo Algorithm
Tomasulo有一些有意思的部件,介绍如下。
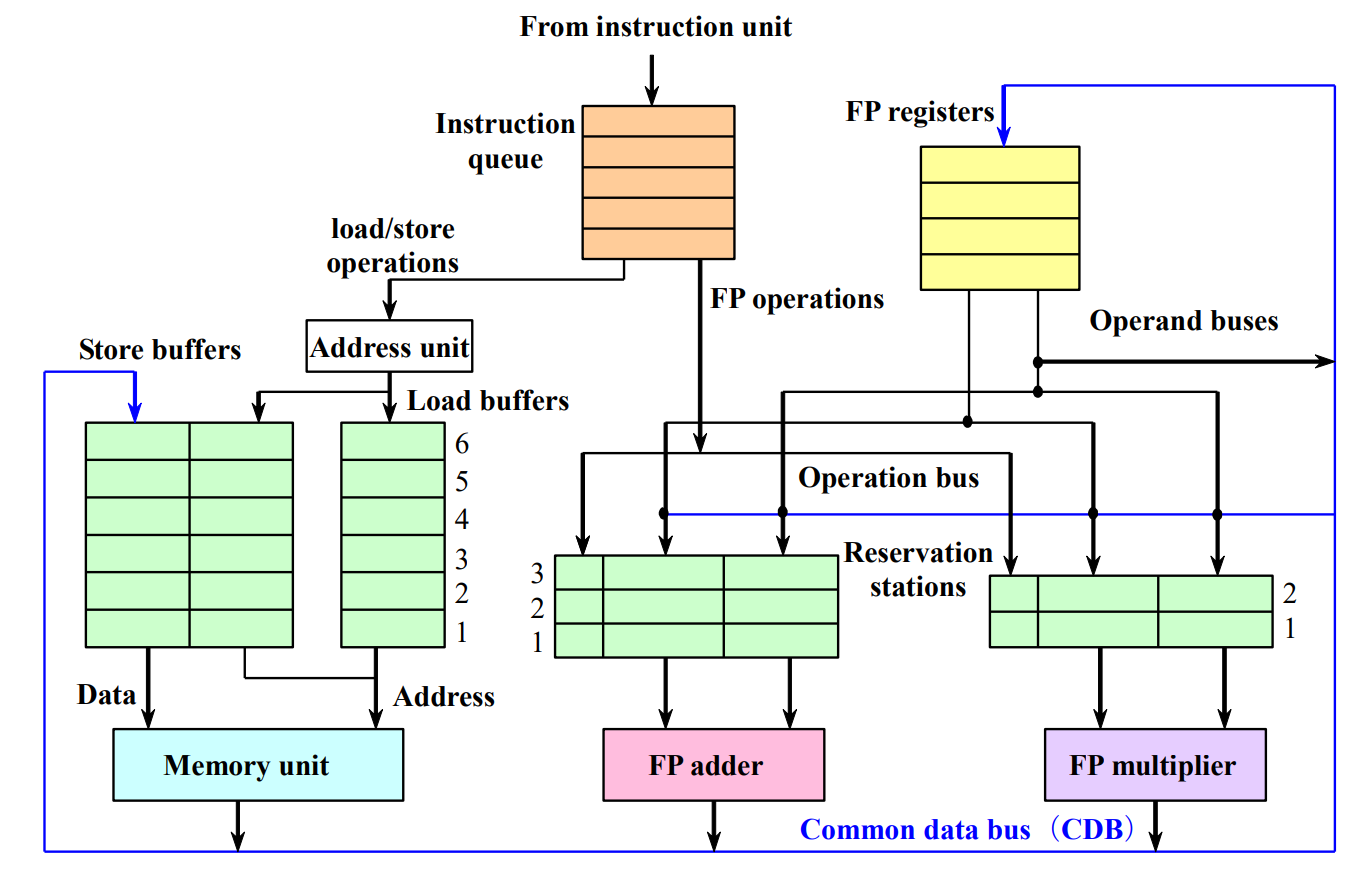
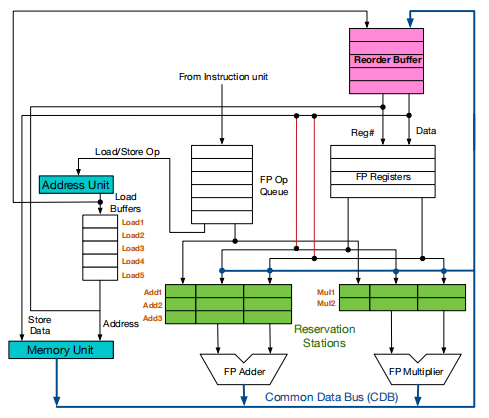
保留站 (Reservation Stations)¶
保留站的结构也像一张表格,每一行代表了一个功能部件以及被发射出来到这个功能部件的指令。
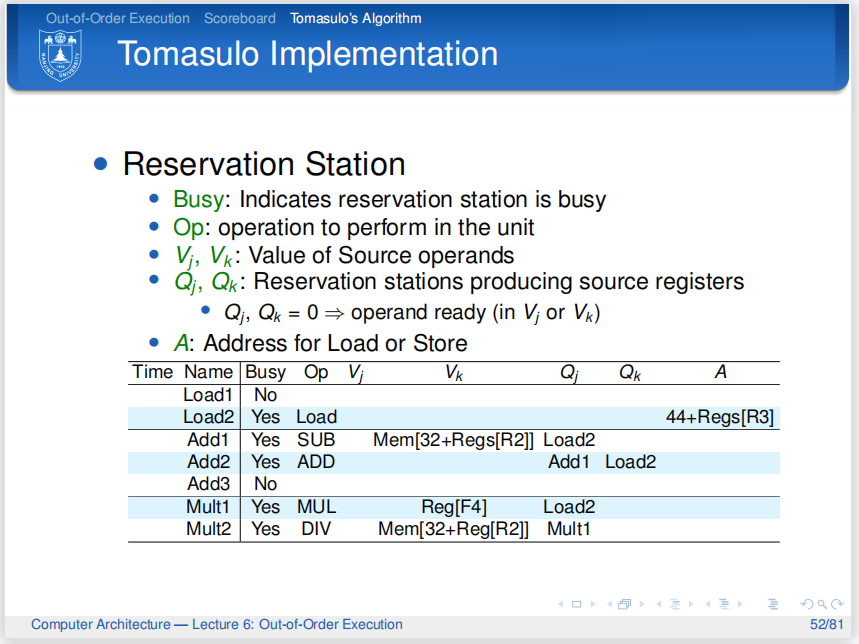
保留站
上图的结构和Scoreboard里的Function Unit Status表格很像,但是还是有许多不同的:
-
在保留站中,
Vj,Vk不同于计分板中的Fj,Fk,它直接存放了寄存器或是内存中的数据,而非单纯的寄存器编号之类。并且,Tomasulo中存在一条总线,某条指令要读取的数据如果没有准备好,它不会等待去某个特定的寄存器地方读取,而是在保留站中记录这条数据会来自于哪个其他保留站。当这个保留站做完时,它会把数据放在总线上广播。这样,数据读取就独立于寄存器,消除了WAR冒险,因为要读取的数据在一开始就读取好了。- 实际上,这也是寄存器重命名的体现 -- 寄存器的名字不再是寄存器的名字,而是保留站的名字。
-
在上图中,似乎有三个加法单元,但实际上,这其实代表了一个加法单元中的三条指令。在计分板中,一个单元只能承担一条被发射的指令,这很容易导致阻塞。所以在Tomasulo中,就采取了这样的设计。相当于保留站为每个单元设置了缓冲区,指令可以在单元忙碌的时候发射到保留站的缓冲区待命。
-
A:load或store的地址
寄存器状态表¶
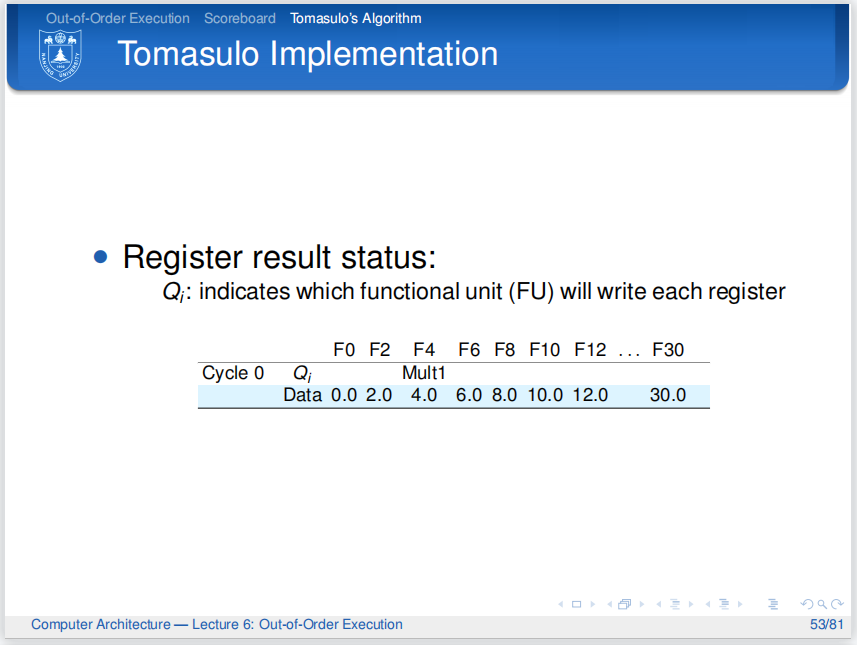
寄存器状态表
这个和计分板差不多。
公共数据总线 (Common Data Bus - CDB)¶
-
连接所有功能单元的输出、保留站和寄存器文件。
-
功能单元完成计算后,将结果连同产生该结果的保留站的名称(作为一个标签)一起放到 CDB 上进行广播。
-
CDB 是一种高速总线,理论上在一个周期内可以传输多个结果(取决于实现)。
调度过程¶
Tomasulo的调度过程没有
Read Operands阶段,而是直接在Issue阶段就读取了操作数.
-
Issue阶段-
检查对应通路的保留站还有没有位置,如果有,就发射指令到保留站.
-
周期结束时,更新保留站和寄存器状态表.如果指令的操作数可以读取,立刻读取到保留站中.
-
寄存器结果状态表中总是存有最新的值,即如果后序指令的目的寄存器和前序指令的目的寄存器重合,那就只保留后序指令的写信息。这样就解决了WAW冒险.
-
fadd.d f6,f0,f8fsd f6,0(x1)fmul.d f6,f10,f8,这三条指令连续跑,寄存器f6就可以直接认为存fmul.d的结果,因为fsd看的实际上不是寄存器f6,而是前面那个保留站的结果,所以它不会去寄存器里面读值,故无影响。
-
-
Execution阶段-
指令不断监听总线,如果获得了自己需要的所有数据,则进入执行阶段.
-
对于
load和store指令,它们多了一步计算地址的操作,将计算出的地址放在上图中的load buffer和store buffer中.
-
-
Write Results阶段-
当指令完成计算后,将结果放在公共数据总线中,并且广播保留站的名字.
-
其他保留站会监听到这个广播,如果它们需要这个结果,就会把它放在自己的
Vj或Vk中. -
寄存器文件也会监听到这个广播,如果它们需要这个结果,就会把它放在寄存器文件中.
-
from zhihu
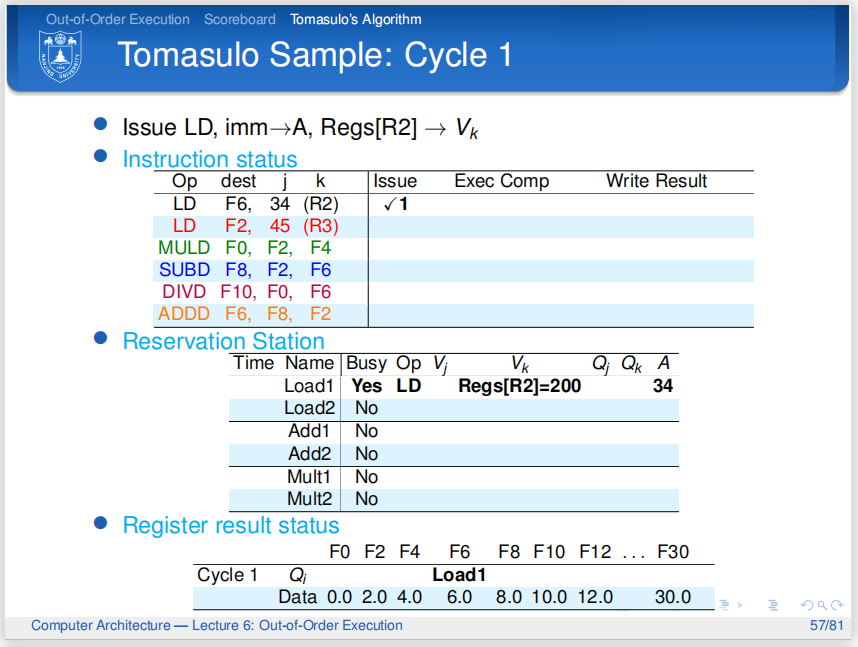
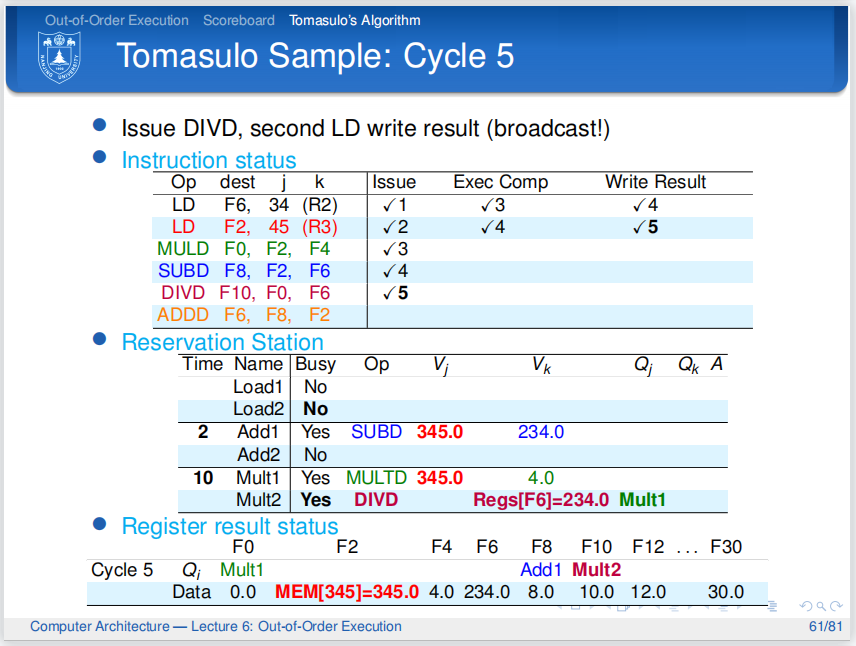
第一个周期,LD指令发射!A目前还是地址偏移立即数
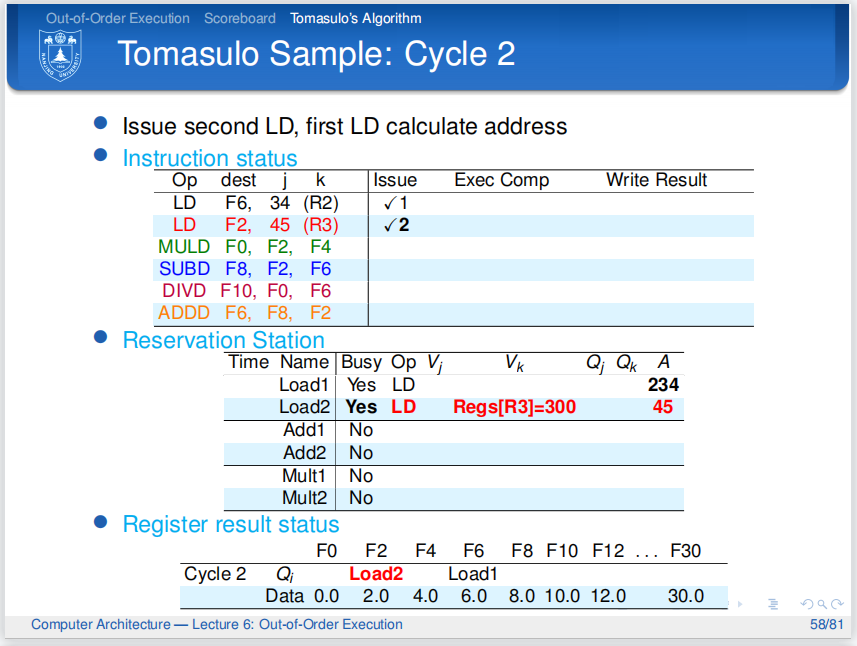
第一条LD指令的A已经计算为\(200+34=234\),并且放在了保留站中.由于它还在计算存储地址,所以没有进入下一阶段
第二条指令也是LD指令,因为保留站一共有两个空位,所以它也顺利发射了.
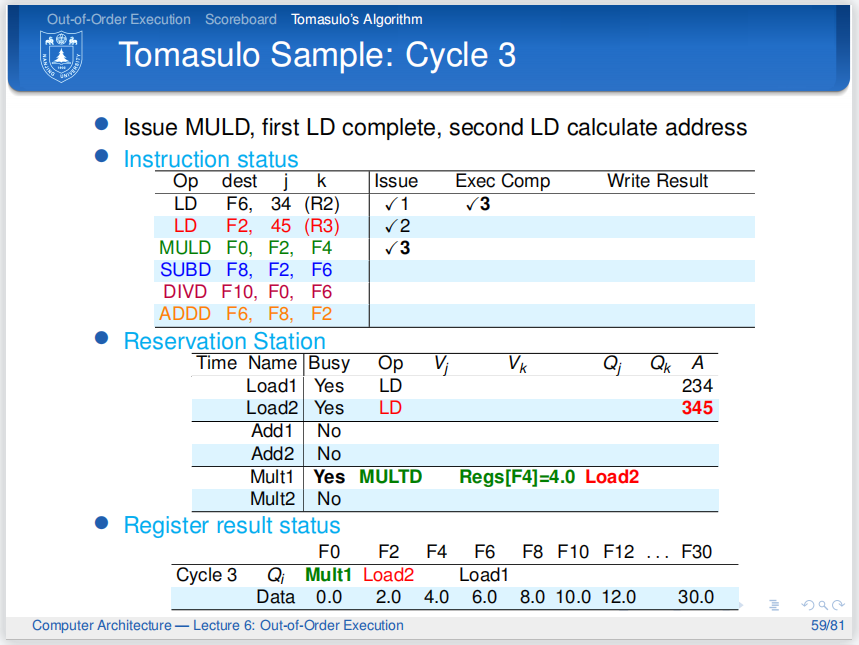
前面都正常进行.
第三条指令要用到第二条指令load出的F2,所以它在保留站内标记了Load2,并且等待.
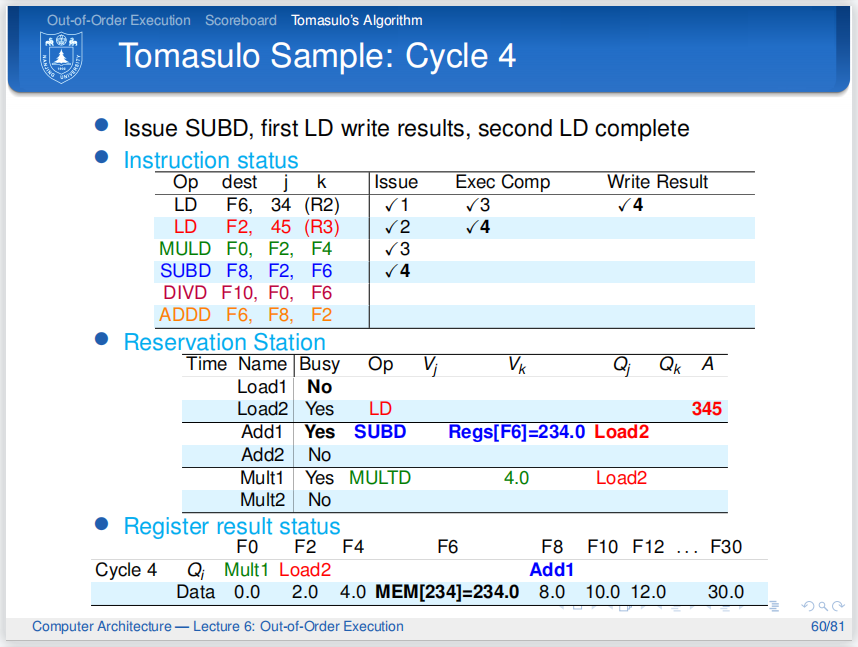
第四个周期,第一条指令来到Write Results阶段,它的结果放在了公共数据总线中,并且广播了保留站的名字.
第二条指令开始取值
第三条指令依然在等待.
第四条指令发射,不够它也要等待第二条指令.
周期结束时,第一条指令清除自己在保留站中的痕迹,Busy位置0,表示这一行不存有指令信息,并消除寄存器结果状态表中的记录,表明F6现在是最新值
第二条指令完成了Write Results,并且广播了保留站的名字.
第三条指令通过CDB总线抓取到了源数据,下一个周期就会开始执行,图中Mult1前面的数字10表示这条指令接下来将用十个周期完成执行
同理第四条指令通过CDB总线抓取到了源数据,下一个周期就会开始执行
第五条指令,保留站有空位,顺利发射,但它需要F0的数据,于是Qj是Mult1,并且等待.
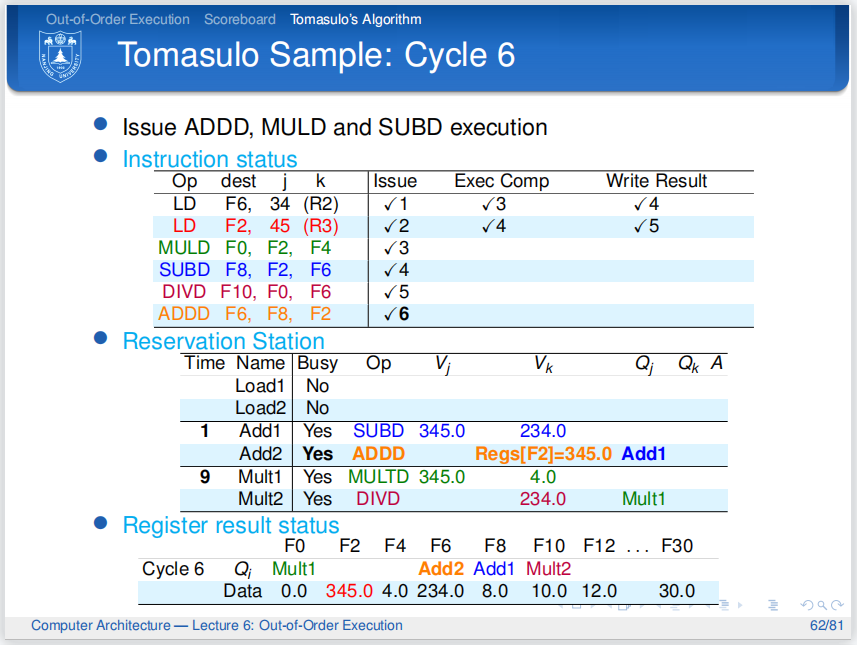
第六个周期,第三条指令开始执行.
第四条指令也开始执行.
第五条指令等待
第六条指令发射...
后面就不讲了(因为知乎上也没图了)
重点,同样来自知乎
-
一条指令能否发射,要看对应配置通路的保留站是否有空余,只要有空余,就可以发射到保留站中等待执行;发射的同时会把能读取的数据直接拷贝到保留站,这样做就不用考虑WAR,后续的指令只要完成就可以写回,不用顾虑是否会有前序指令需要读取寄存器,换句话说,每一条被发射到保留站中的指令都不再需要读取寄存器堆。
-
指令在发射的时候会更新寄存器状态表,如果后序指令和前序指令的目的寄存器重合了,就用后序指令的写信息标志寄存器,表示只会把后序指令的计算结果写进寄存器,这样可以解决WAW;
-
如果执行单元中有指令正在执行,其他指令就在保留站中等待;如果指令缺少源数据,就留在保留站中,时刻监听CDB总线,如果CDB总线广播了需要的数据,就立马拷贝下来,然后准备执行。
-
一条指令在源数据全部准备好之后就可以执行,执行可能是多周期的。
-
一条指令只要完成计算,就可以写回,写回的数据通过CDB总线直通寄存器堆和各个保留站。但是要注意的一点是指令的结果未必会写进寄存器堆,因为寄存器结果状态表中总是存有最新的状态,即如果发生WAW冒险,Tomasulo算法会记录下最新的写指令,而抛弃前序的写指令结果,前序写指令的结果不会写回到寄存器堆,这样的做法很符合数据流思维。
Tomasulo with ROB(Hardware-Based Speculation)¶
传统的Tomasulo一般是乱序写回的,这样会有一个问题.
因为冯诺依曼结构向程序员承诺了处理器会按照程序的顺序来执行指令,
因此程序员在调试程序的时候会希望当他在某行代码停下来的时候,代码前面的指令全部执行完,而代码后面的指令一条都没有执行
当然,我们也可以手动强制一条指令在写回时停滞,等待它前面的指令完成,但这样会导致性能下降.
因此,ROB(Reorder Buffer)就应运而生了.
Reorder Buffer
可以发现,与原始的Tomasulo相比,主要有以下变化:
-
CDB总线现在通往
ROB,而不是寄存器堆. -
保留站现在可以从
ROB中读取数据. -
ROB实际上就是一个FIFO队列,它的每一行都可以存放一条指令的结果,先进先出.
那么为什么ROB是硬件上的Speculation(猜测)呢?
因为它允许在不知道指令是否真正会执行的情况下,先让指令执行并存储结果.
一个ROB项(entry)的字段有:
-
Insrtuction Type:指令类型,比如load或store还是branch -
Destionation:目的寄存器,如果是store指令,则是存储地址. -
Value:指令的结果,比如ALU操作的结果,branch指令的目标地址等. -
Ready:指令是否完成.
包含了ROB的Tomasulo算法的由如下几个阶段组成:
-
Issue:-
和原始的Tomasulo算法一样,发射指令到保留站中,并且更新寄存器状态表.
-
但此时指令可以从ROB或者寄存器中读取数据.
-
同时,
ROB.push_back(inst),将指令放入ROB中. -
需要注意的是,此时寄存器状态表中的编号不再是保留站的编号,而是指令在
ROB中的编号. -
同时,保留站中的
Qj和Qk也不再是其他保留站的编号,而是ROB中的编号.
-
-
Execution:- 和原始的Tomasulo算法一样
-
Write Back:- 指令执行完之后直接写到
ROB中,同时数据在CDB上广播.
- 指令执行完之后直接写到
-
Commit:-
当队列头部的指令
Ready时,就可以提交了. -
把指令的结果写到寄存器中
-
如果是
branch指令,这检查是否预测正确,如果不正确,则清空ROB中的所有指令. -
如果是
store指令,则将数据写入内存中 -
当然,如果头部的指令一直没有
Ready,就一直等待.
-
重点from知乎
-
使用ROB的Tomasulo中,指令能否发射主要观察两点——保留站是否有空闲和ROB是否有空闲,如果都有空闲,就可以发射,发射之后指令会分别占据保留站、ROB一个表项,并用ROB的编号标记寄存器结果状态表;
-
如果指令不能从逻辑寄存器堆读取到所需数据,就会根据寄存器结果状态表的查询结果查询数据,此时会有三个情况:一是数据由正在执行的指令得出,此时指令需要在保留站中监听CDB;二是数据正在ROB中,但是没有提交,此时指令会从ROB中读出数据;三是数据正在CDB总线上广播,此时指令读取CDB的数据;
-
一旦指令的数据准备完毕,就开始执行,执行可能需要很多个周期,此时别的类似指令就要在保留站中等待,值得注意的是,在上面的案例中指令在执行时并不会清除保留站,而实际上此时可以清除保留站了,这样做的优点会在第四节说明;
-
指令执行完毕后就可以写回,数据会被写回到ROB,但是暂时还不会更新逻辑寄存器堆,同时数据会由CDB广播出去;
-
当一条指令成为ROB中最老的指令时,即ROB的头指针指向该指令时,该指令就可以提交,提交周期结束时逻辑寄存器会被更新,ROB的对应Busy位会被置为无效,头指针会指向下一条指令。