数据级并行¶
约 3184 个字 82 行代码 19 张图片 预计阅读时间 17 分钟
Vector Architecture¶
Grab sets of data elements scattered about memory:抓取分散在内存中的一组数据元素
Place them in large sequential reg files
Operate on data in those data files
Disperse the results back to memory:将结果重新分散回内存
也就是说,向量架构的核心思想就是集中读取,统一处理,批量写回.
RV64V¶
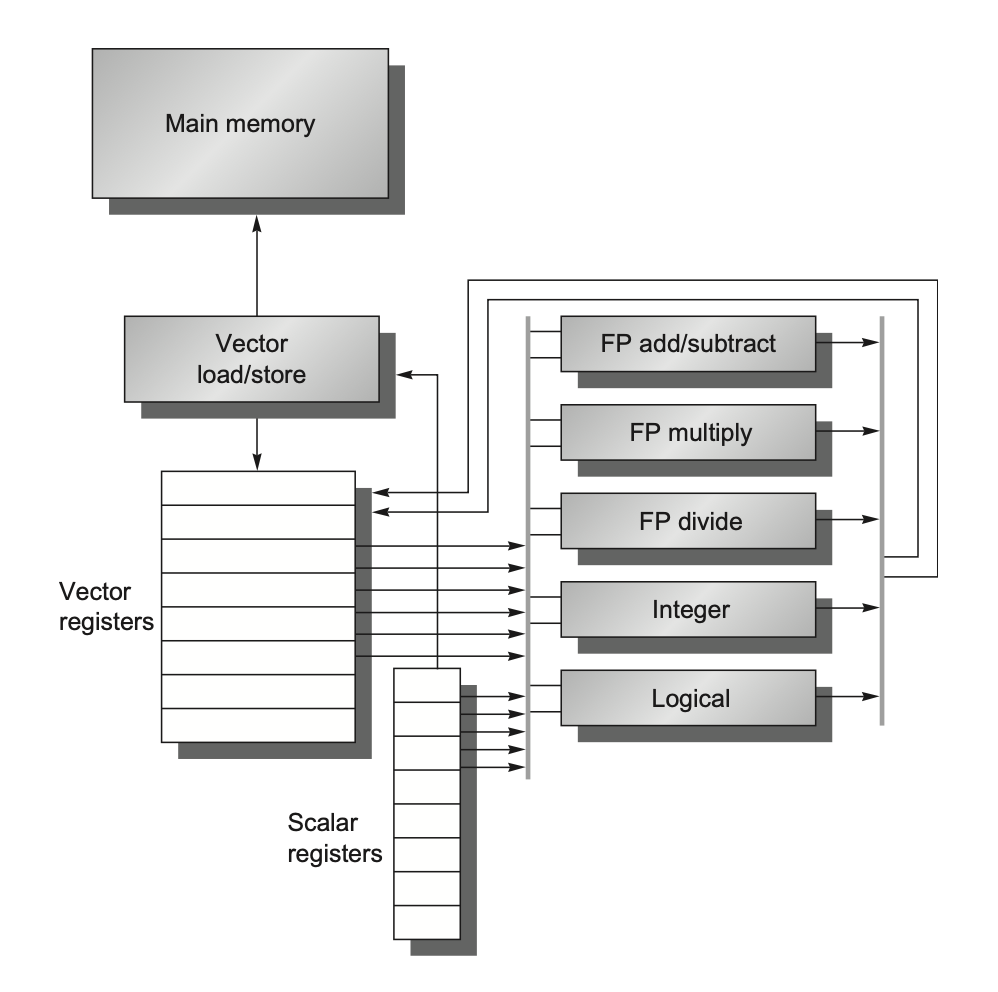
上图展示了一种经典的向量处理器,与普通的处理器相比,有如下变化:
-
Vector load/store: 向量加载和存储指令,可以从内存中加载向量数据到寄存器中,或者将寄存器中的向量数据存储到内存中.
-
Vector register file: 向量寄存器文件,可以存储多个向量数据.
- 为了支持向量操作,向量寄存器会有许多读写端口
-
Vector functional units: 向量功能单元,可以对向量数据进行操作.也即,相比于普通的功能单元,它们的位宽更大了.
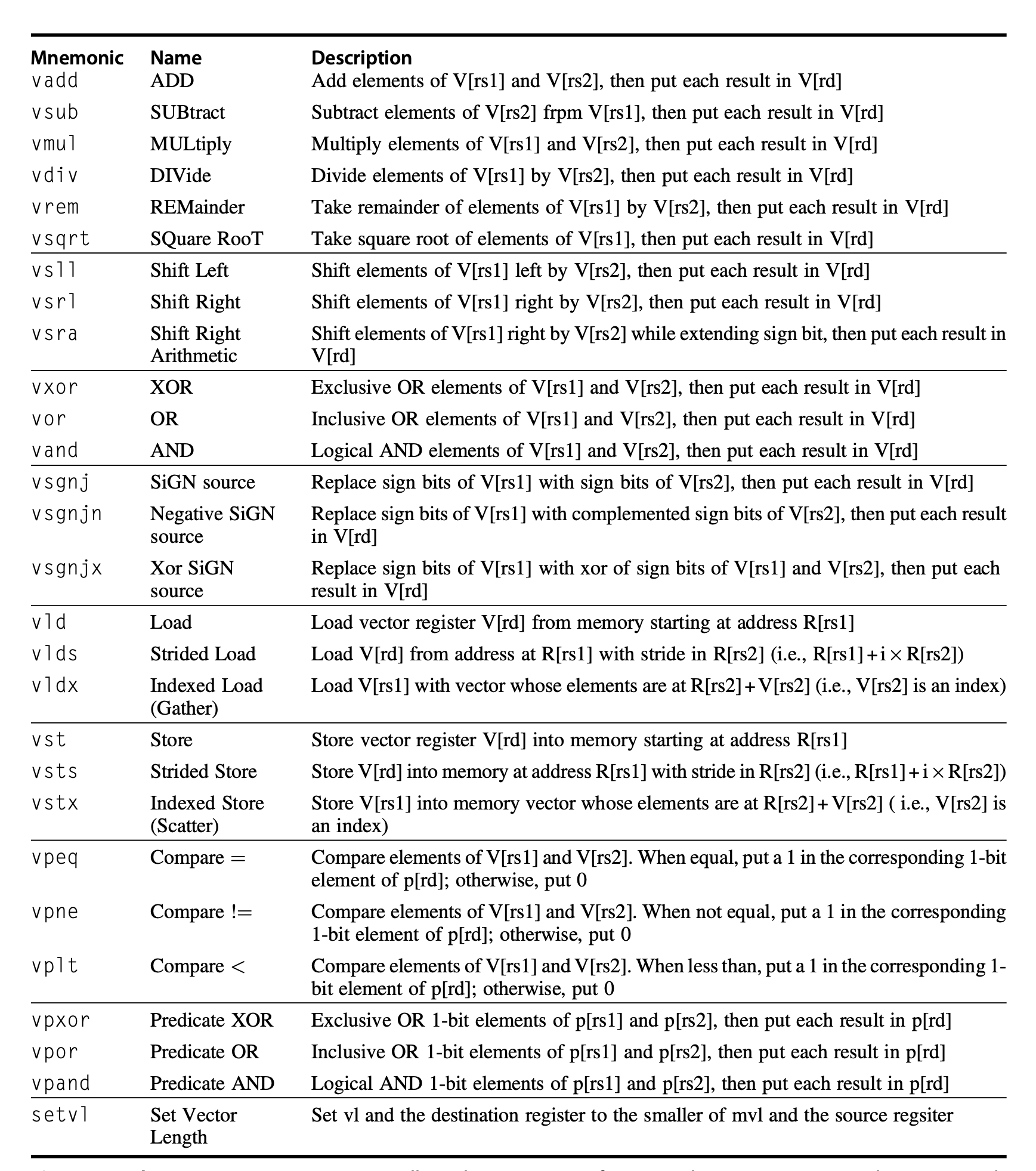
向量指令
-
向量指令的格式与普通指令类似,但是它们的操作数是向量寄存器,而不是标量寄存器(当然也有一些向量指令的操作数是标量寄存器,比如
vadd.vx指令). -
向量指令的操作数可以是任意长度的向量,而不是固定长度的标量.
-
vldvst等指令接受两个操作数,第一个操作数表示向量寄存器的编号,第二个操作数是一个标量寄存器的编号,寄存器内存放着向量数据的内存起始地址.
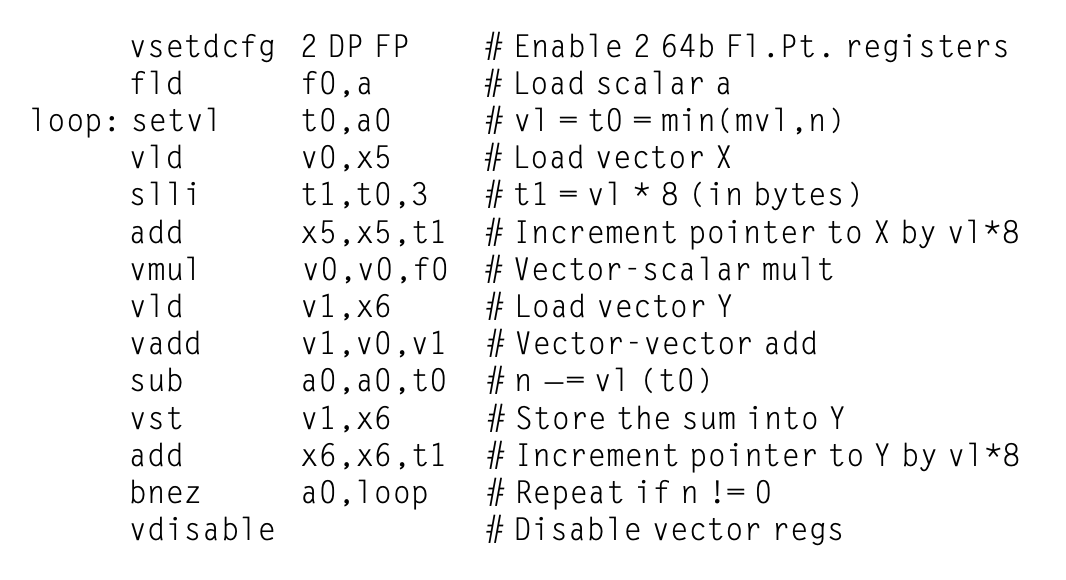
对于下面的指令,
fld f0,a #load scalar a
addi x28,x5,256 #last address to load
Loop: fld f1,0(x5) #load x[i]
fmul.d f1,f1,f0 #multiply x[i] * a
fld f2,0(x6) # load y[i]
fadd.d f2,f2,f1 # y[i] = y[i] + x[i] * a
fsd f2,0(x6) # store y[i]
addi x5,x5,8 # next address
addi x6,x6,8 # next address
bne x5,x28,Loop
我们可以变成
vsetdcfg 4*FP64 # set vector length to 4*FP64
vld v0,0(x5) #load x[i]
vld v2,0(x6) # load y[i]
fld f0,a #load scalar a
vmul.vx v1,v0,f0 #multiply x[i] * a
vfadd.vv v3,v1,v2 # y[i] = y[i] + x[i] * a
vst v3,0(x6) # store y[i]
这样,就可以把原来标量的大量重复操作变成了向量操作,从而提高了性能.
Chain
下面两条指令:
-
这两条指令就形成了一个"Chain",因为
VMUL依赖于VADD的结果. -
如果硬件支持 chaining,
VMUL不需要等VADD完整处理完所有元素才开始执行,而是只要VADD处理完第一个元素,VMUL就可以开始用这个结果做乘法。
Execution Time¶
-
Convoy: 一组可以并行执行的指令,它们之间没有结构冒险
- RAW在这里是允许的,因为有"Chain"的存在.
-
Chime(拍): 执行一个Convoy需要的时间
我们再来看上面的指令:
vsetdcfg 4*FP64 # set vector length to 4*FP64
vld v0,0(x5) #load x[i]
vld v2,0(x6) # load y[i]
fld f0,a #load scalar a
vmul.vx v1,v0,f0 #multiply x[i] * a
vfadd.vv v3,v1,v2 # y[i] = y[i] + x[i] * a
vst v3,0(x6) # store y[i]
-
有几个Convoy
-
vld v0,0(x5)和vmul.vx v1,v0,f0形成一个Convoy -
vld v2,0(x6)和vfadd.vv v3,v1,v2形成一个Convoy -
vst v3,0(x6)形成一个Convoy -
所以一共是3个Convoy.
-
-
每个FLOP(floating Point Operation)需要多少个时钟周期
-
假设是32个元素的向量
-
每个Chime需要32个周期
-
3个Chime,所以一共需要96个周期
-
3个Chime执行了两个浮点数操作(vmul和vfadd),所以每个FLOP需要1.5个周期.
-
Summary
-
A vector sequence that consists of m convoys executes in m chimes.
-
For a vector sequence of n elements, this sequence takes approxiamtely \(m \times n\) clock cycles
How to optimize¶
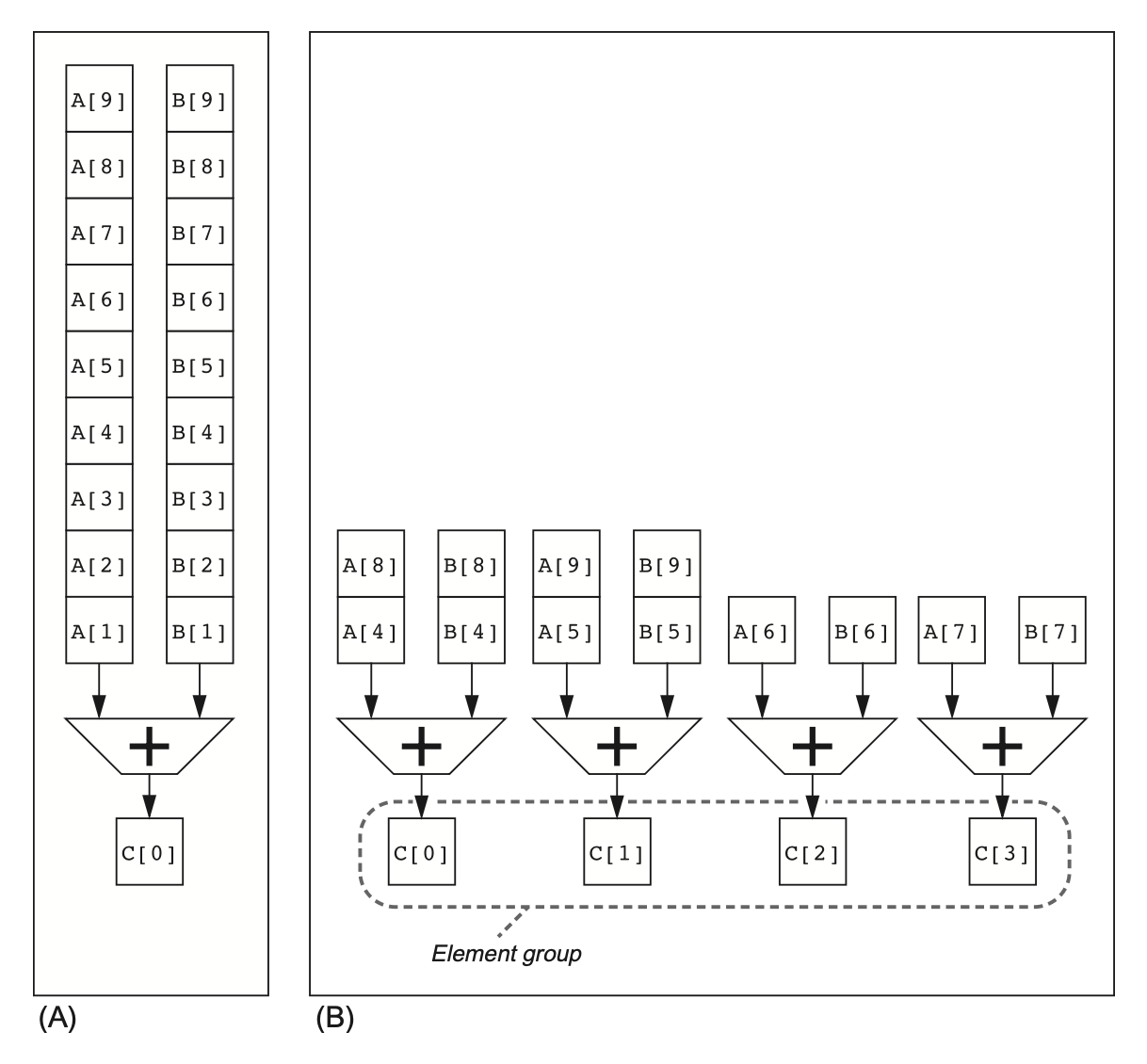
Multiple Lanes¶
- 使用更多的功能单元,比如4个功能单元,可以把一个Chime分成4个Lane,每个Lane执行一个操作.
Vector-Length Registers¶
在编译时,向量长度总是未知的
一段代码可以需要多种向量长度
比如:
这里向量的长度取决于N的值,而N的值在编译时是未知的.
为了解决这个问题,RV64V引入了向量长度寄存器(vl),它可以控制任何向量指令的长度,但不能超过最大向量长度(mvl)
然而,如果N有可能超过mvl的话,我们需要使用Strip Mining技术,也就是把一个大的向量分成多个小的向量,然后分别处理.
具体做法是:
-
将向量操作分为两个loop
-
一个loop处理mvl的倍数个元素
-
另一个loop处理剩下的元素
int VL = 8; // 向量宽度
for (int i = 0; i < 100; i += VL) { // 外层:按向量宽度分段
int len = std::min(VL, 100 - i); // 处理边界
for (int j = 0; j < len; ++j) { // 内层:一个 strip 内逐个处理
A[i + j] = B[i + j] + C[i + j];
}
}
setvl
我们有一种更优雅的方式来处理.
-
a0:请求的向量长度 -
t0:实际的向量长度
有了setvl,我们就不需要手动处理了,编译器会自动处理.
for (int i = 0; i < N; i += VL) {
int vl = setvl(N - i); // 设置本次迭代实际向量长度
vse.v v0, (a + i), vl; // 向量存储
}
实际上,setvl和min(mvl, N - i)是等价的,但是setvl会更高效,因为它可以在硬件上实现.
这里就是一个使用setvl的例子,它会自动处理向量长度的问题,我们不需要再担心N的大小.
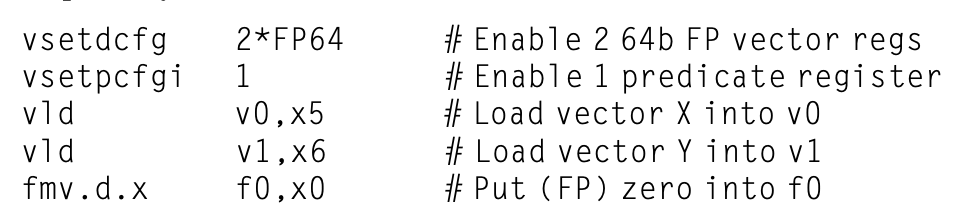
Predicate Registers¶
当我们遇到if-else分支时,向量处理就变得很棘手了.因为此时向量的每一位都可能作不一样的操作
Predicate寄存器存储位数与向量长度一致,我们在运行时,先把if-else的条件计算出来,然后把结果存储到Predicate寄存器中,所有向量指令仅操作对应项在Predicate寄存器里的值为1的元素,对应值为 0的元素就不会发生改变。
上面的代码最终可以变为:
Memory Banks¶
内存 bank(内存子块)是内存内部的并行访问单元,多个 bank 允许同时进行多个读写操作,从而提高带宽、避免访存瓶颈。
算数单元的速度会比内存快很多,所以我们需要把内存分成多个bank,这样可以提高内存的带宽.
Example
Cary T90有32个处理器,每个处理器在每个时钟周期要进行4次load和2次store
处理器周期长度:2.167ns
SRAM周期长度:15ns
这样,处理器会比内存快很多,那么,我们需要把内存分为几个区才能让所有处理器跑满带宽?
解答
每一个处理器周期,进行\((4+2) \times 32 = 192\)次load/store,也就是192次内存访问.
一个SRAM Cycle相当于7个处理器周期,所以每个SRAM Cycle进行\(192 \times 7 = 1344\)次内存访问,也就是1344个bank.
Stride¶
Stride是指在内存中访问数据时的步长,也就是每次访问数据时跳过的元素个数.
for (i = 0; i < 100; ++i)
for (j = 0; j < 100; ++j) {
A[i][j] = 0.0;
for (k = 0; k < 100; ++k)
A[i][j] += B[i][k] * D[k][j];
}
C语言是Row-Major的,那么我们在访问D[k][j]时,每次会跳过100个元素,也就是\(100 \times 8 = 800\)字节
所以:
-
Unit Stride:访问相邻的元素
-
Non-Unit Stride: 访问不相邻的元素
-
vlds(load vector with stride):-
vlds指令可以加载一个向量,但是它的步长不是1,而是stride. -
vlds指令的格式为vlds v0, base, stride, vl // vector load strided,表示从内存地址base开始,按间隔stride字节,加载vl个元素到向量寄存器v0。 -
vlds指令会把加载的向量存储到v0寄存器中.
-
-
vsts(store vector with stride):vsts指令的格式为vsts v0, base, stride, vl
-
如果一个分区有多个访问,冲突就发生了.
当满足下面的条件时,我们认为发生了冲突
其实也就是看这次访问这个bank和下次访问的间隔是否足够完成一次访问
LCM:最小公倍数
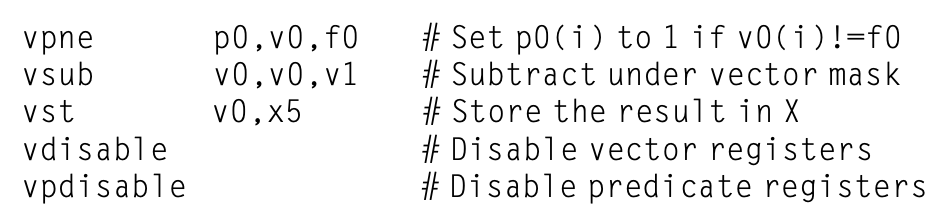
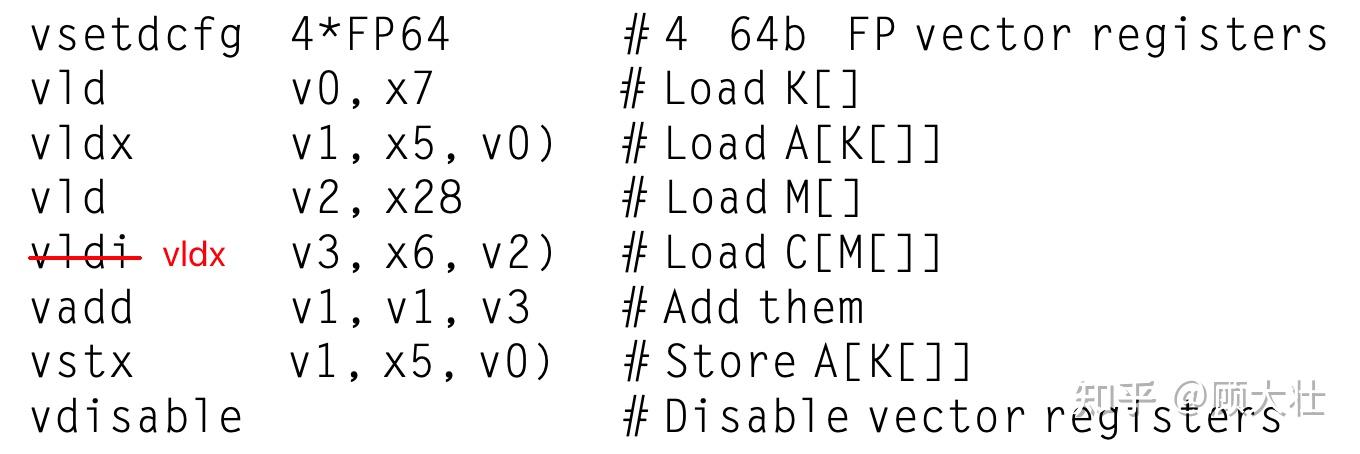
Gather-Scatter¶
-
A和C是稀疏向量 -
K和M是索引向量,它们指明了A和C的中的非零元素的位置 -
Gather指令获得索引向量,抓取向量(其向量元素位于基地址与索引向量的偏置量相加的目标地址)。在向量寄存器中会得到一个稠密向量。 -
Scatter指令将稠密向量的元素分散到稀疏向量中,稀疏向量的元素位置由索引向量指定。
SIMD¶
与vector很像,区别在于它的向量是固定长度的
-
固定长度向量:SIMD指令通常操作的是固定长度的向量。向量的长度由SIMD寄存器的宽度和数据类型决定(例如,一个128位寄存器可以容纳4个32位浮点数或16个8位整数)。如果需要处理的数据量超过了这个固定长度,程序员或编译器需要显式地使用循环(通常称为“Strip Mining”)来分块处理数据。
-
动态长度向量(传统向量架构):相比之下,一些更传统的向量架构(如Cray向量处理器或RISC-V向量扩展)支持可变长度的向量操作,通常通过一个特殊的向量长度寄存器(vl)来控制。这使得它们能更灵活地处理任意长度的数据序列,而无需显式分块。
Roofline Visual Performance Model¶
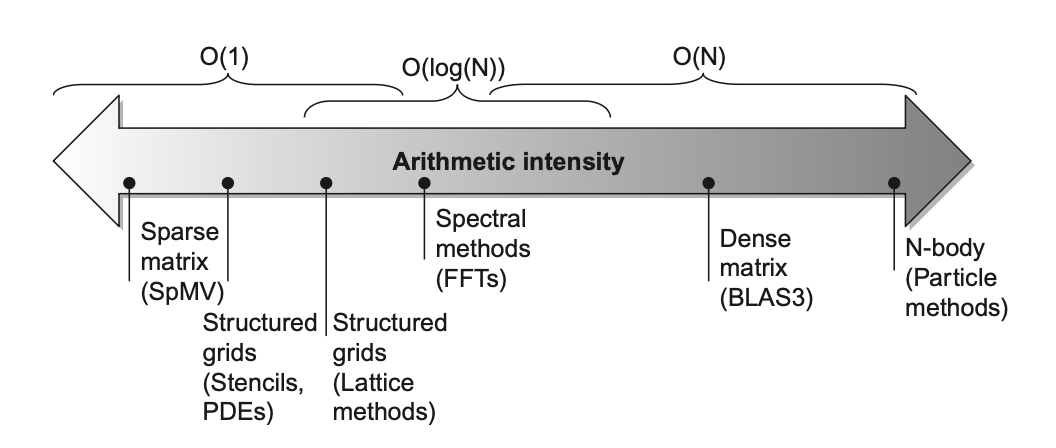
屋顶线模型(Roofline model)用二维图形表示浮点数性能、内存性能以及算术强度之间的关系。
-
X轴:算术强度(Arithmetic Intensity):每访问一字节内存所执行的浮点操作数的数量
-
单位:FLOPs/Byte (浮点运算次数/字节)。
-
反映了算法的计算密度。算术强度越高,意味着算法在数据传输上的计算量越大,对计算性能的依赖性越高。
-
-
Y轴:可达到的性能 (Attainable Performance)
-
单位:GFLOPs/s (每秒十亿次浮点运算)。
-
表示应用程序在该硬件上实际能够达到的浮点运算性能。
-
-
屋顶 (Ceilings):模型中有两条关键的“屋顶”线,它们限制了应用的可达到性能。
- 水平屋顶 (Peak Floating-Point Performance):代表了处理器理论上能够达到的最大浮点运算性能(例如,CPU或GPU的峰值GFLOPs/s)。这是一条水平线,因为无论算术强度如何,性能都不会超过这个硬件极限。
- 倾斜屋顶 (Peak Memory Bandwidth):代表了内存系统能够提供的最大数据传输速率(例如,GB/s)。这条线的斜率等于内存带宽。性能受到内存带宽的限制,计算公式为:
Attainable Performance = Arithmetic Intensity × Memory Bandwidth。
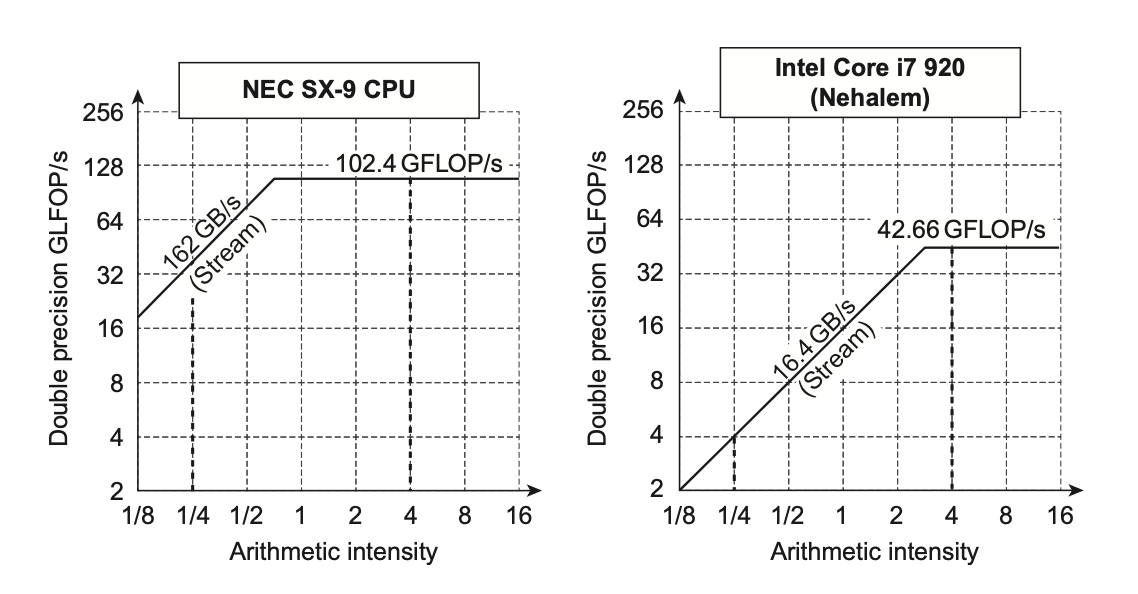
屋顶线模型
GPU is all you need¶
GPU支持多种并行方式,比如multi-threading, SIMD,ILP等
NVIDIA CUDA¶
CUDA,即 Compute Unified Device Architecture,是NVIDIA推出的一种并行计算架构和编程模型。它允许开发者利用GPU的强大计算能力来加速计算密集型应用程序。
-
CUDA Threads: CUDA的基本执行单元是线程。每个线程可以独立执行代码,并且可以访问共享内存和全局内存。
-
CUDA Blocks: 线程被组织成块(blocks),每个块可以包含多个线程。块内的线程可以共享内存,并且可以通过同步机制进行通信。
-
Function Declaration: CUDA函数分为两种类型:主机函数(在CPU上执行)和设备函数(在GPU上执行)。
-
__global__,__device__:用于声明设备函数 -
__host__:用于声明主机函数
-
-
name<<<dimGrid, dimBlock>>>(args):用于调用设备函数-
dimGrid:网格的维度 -
dimBlock:块的维度
-
-
blockIdx和threadIdx:用于获取当前线程的索引
Example
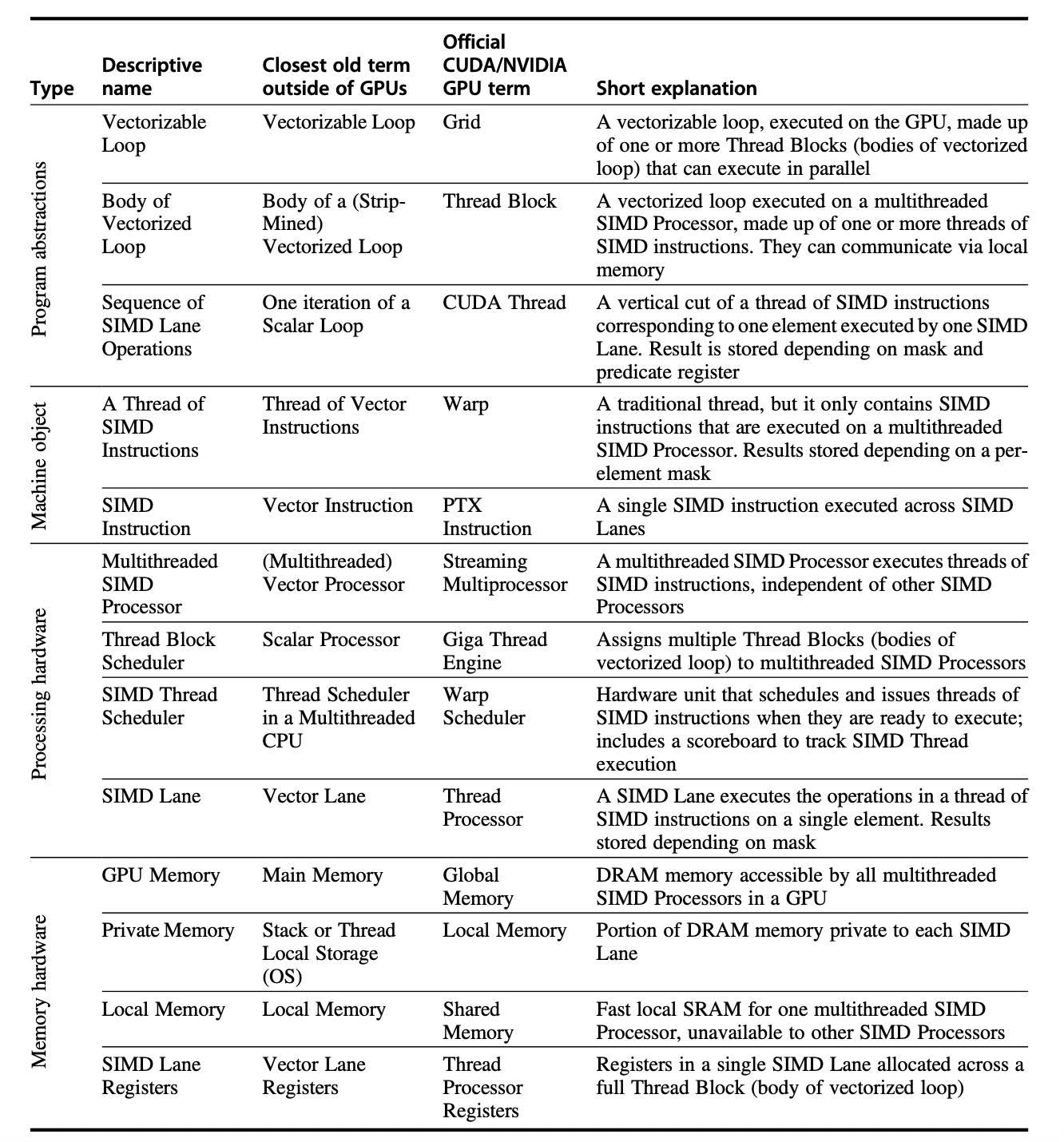
还有一些GPU术语:
GPU Structure¶
-
Grid: GPU的最顶层结构,由多个Block组成
-
Block: Block是GPU的基本执行单元,由多个Warp组成
-
Warp: 通常是32个线程组成的一个执行单元,是GPU调度的最小单位
-
Thread: GPU的最小执行单元,每个Thread可以独立执行代码
-
Element: GPU的最小数据单元,每个Thread可以处理多个Element
比如,对于向量\(A = B \times C\),一个8192个元素的乘法
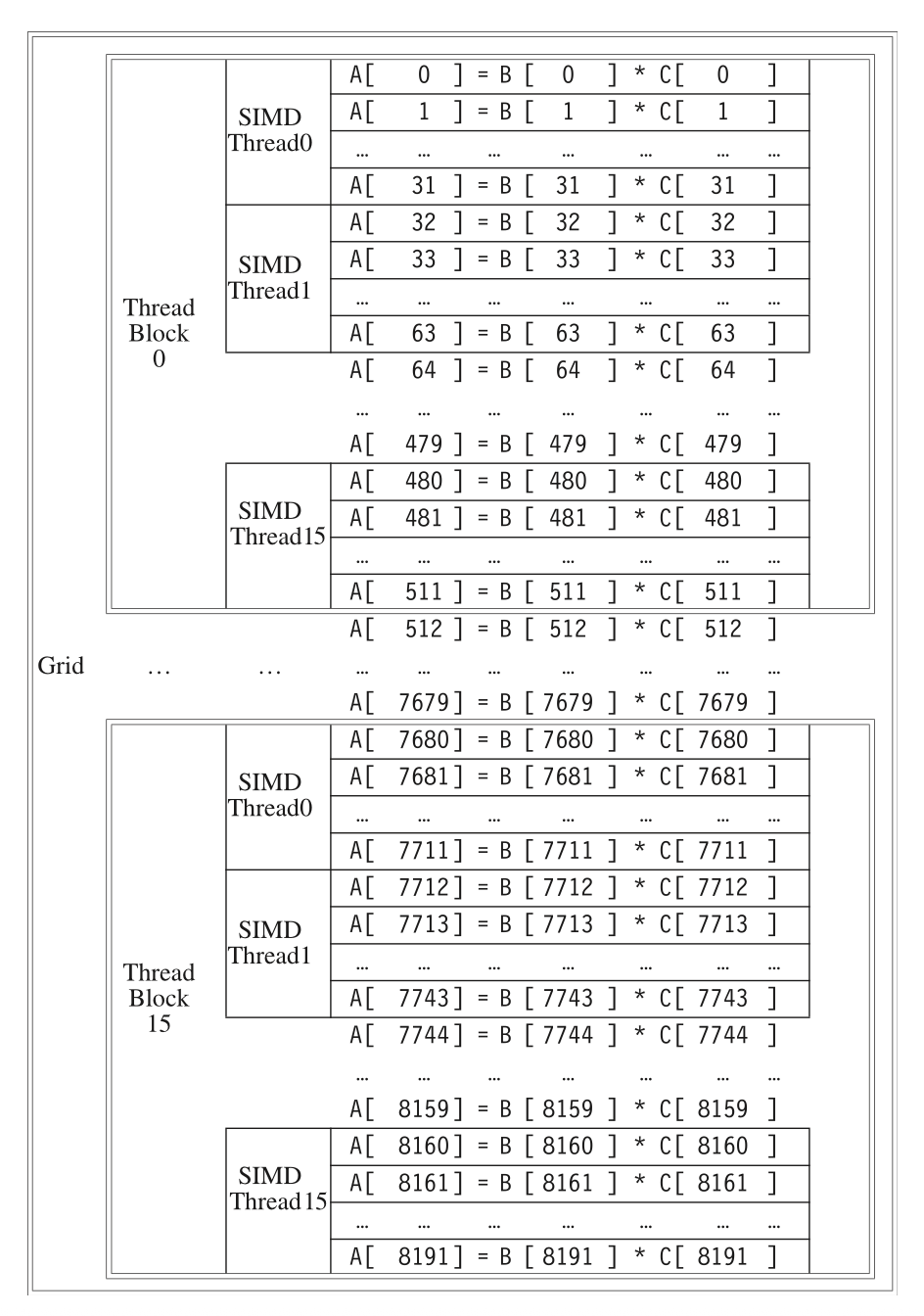
这个grid有16个block,每个block包含16个thread,每个thread处理32个元素
下图是一个简单的多线程SIMD处理器框架
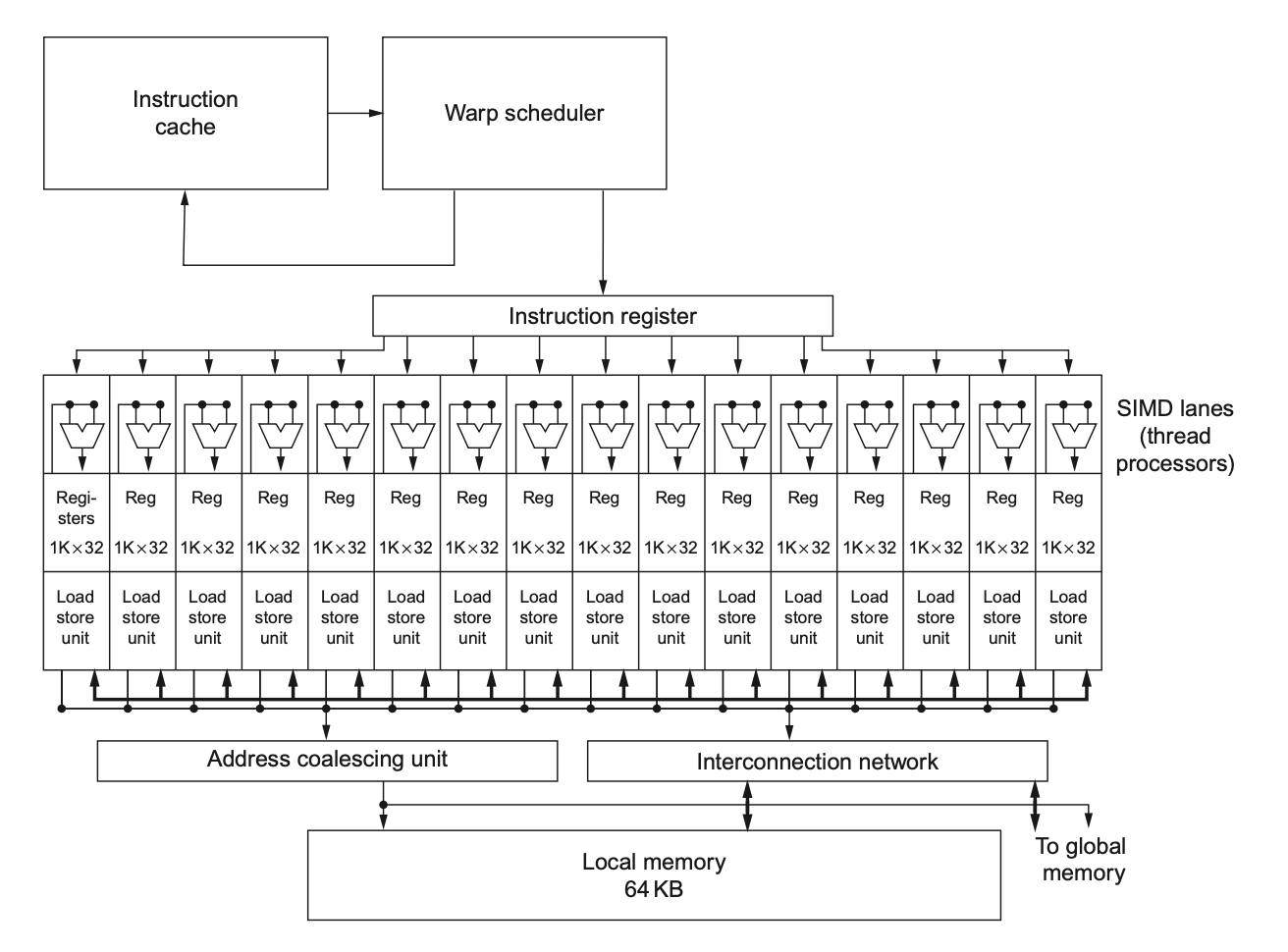
可以看到,多个函数单元是并行的.
SIMD Thread Scheduler¶
一共有两级的GPU调度器:
-
Thread Block Scheduler:负责调度Block,每个Block可以包含多个Thread.将Block分配到多线程SIMD处理器上执行
-
SIMD Thread Scheduler:负责调度Thread,每个Thread可以处理多个Element.调度决定一个SIMD处理器中的线程何时运行
Nvidia GPU ISA¶
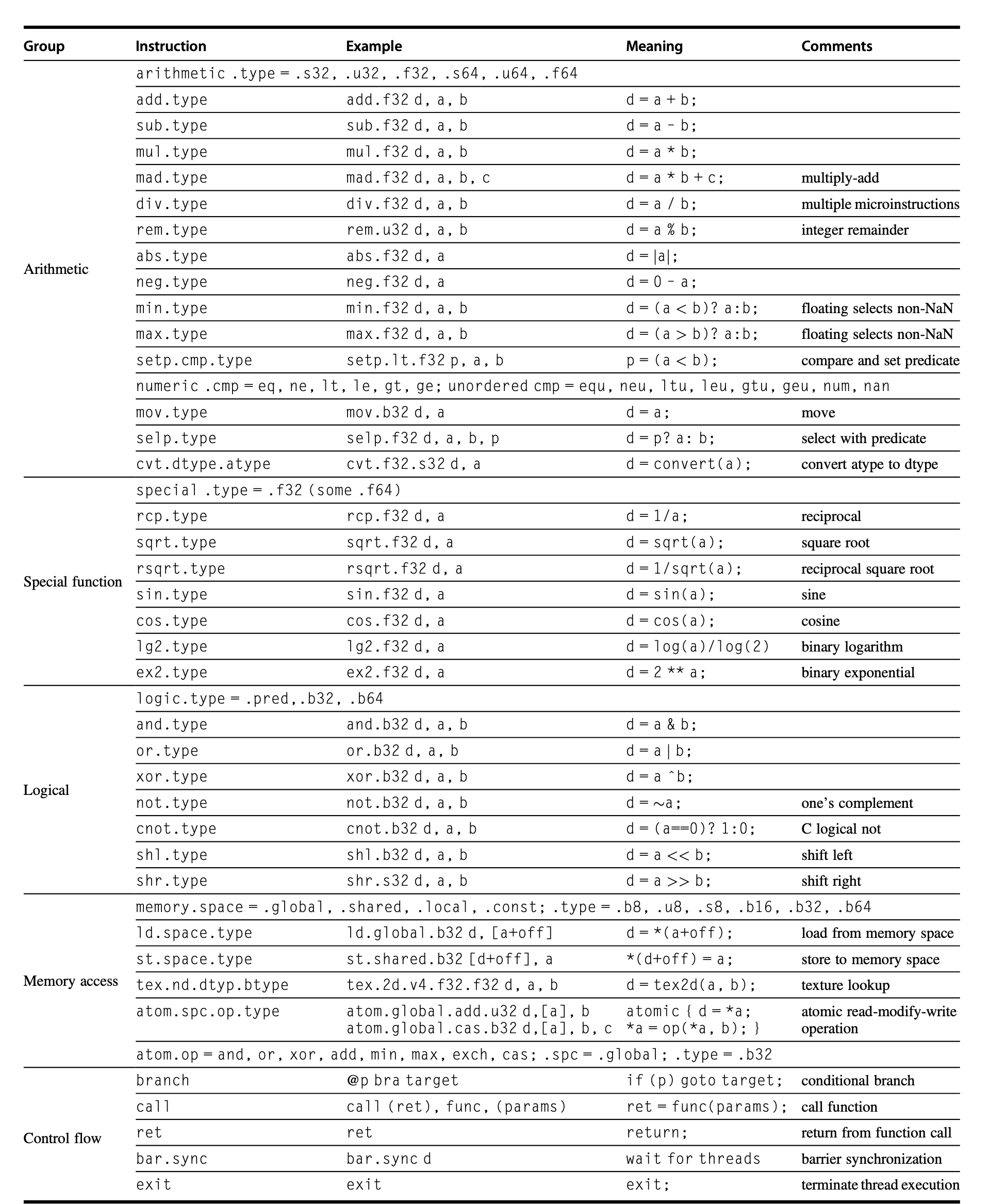
PTX:NVIDIA的并行线程执行(Parallel Thread Execution)虚拟机指令集架构(ISA),提供稳定的指令集供编译器使用
基本的PTX指令
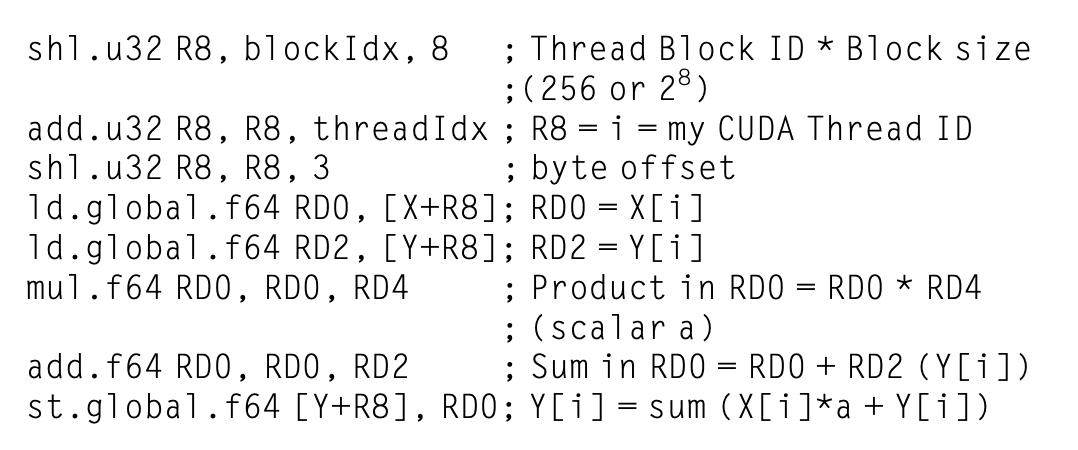
用PTX实现上面的DAXPY就是:
Conditional Branch¶
也使用Predicate寄存器,但是它的实现方式与CPU不同.
-
Predicate Register:每个线程都有一个
Predicate寄存器,用于存储条件判断的结果 -
Predicate Execution:每个线程可以根据
Predicate寄存器的值决定是否执行某条指令
// PTX code for conditional execution
.reg .pred p;
setp.ne.b32 p, r1, 0; // Set predicate if r1 is not equal to 0
@p add.f32 r2, r2, r3; // Conditionally execute if p is true
GPU Memory¶
别问我笔记为啥这么少,因为上课几乎就是飞速带过...
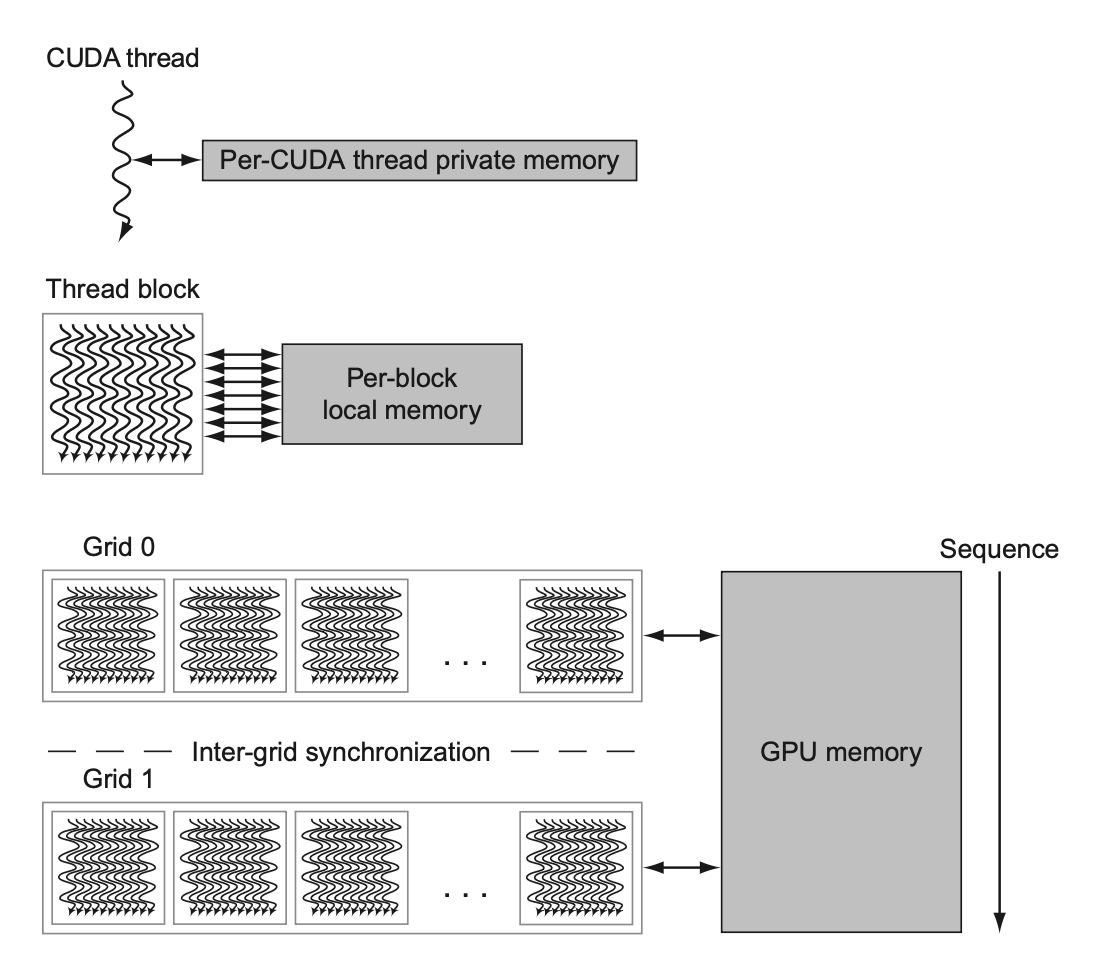
GPU Memory Hierarchy
详细的看这里
GPU vs Vector¶
GPU中的术语对标Vector
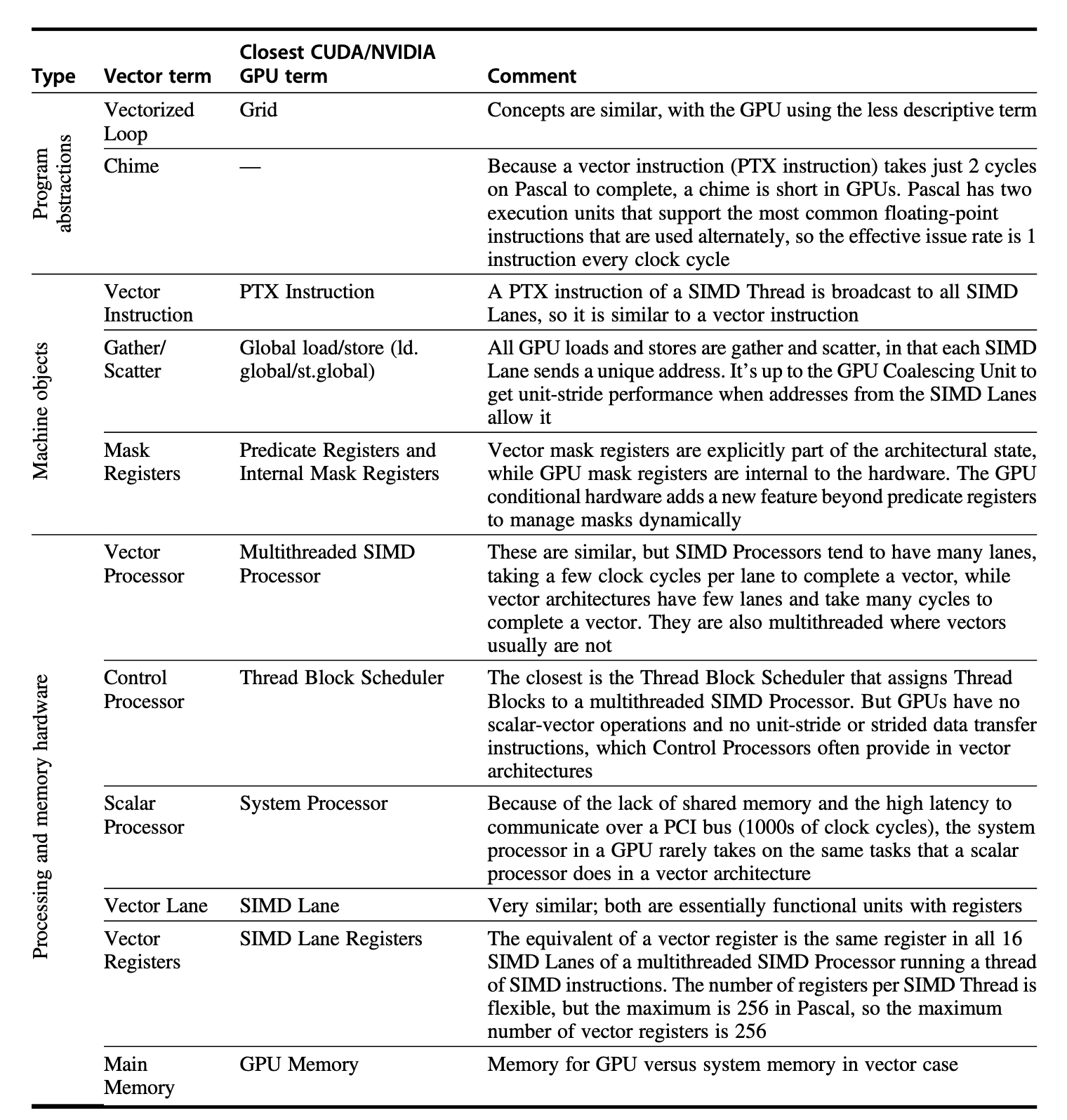
以及架构的对比:
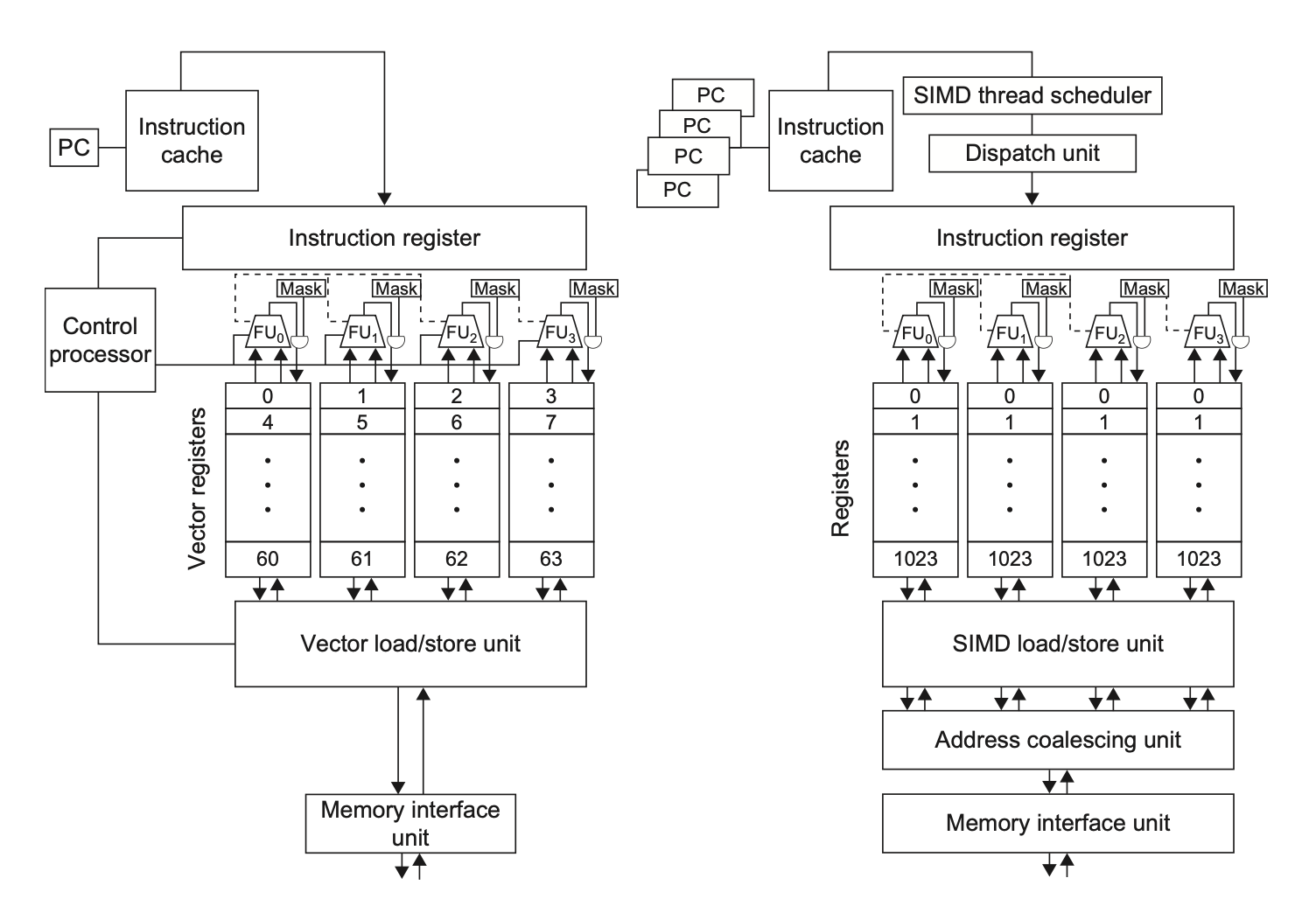
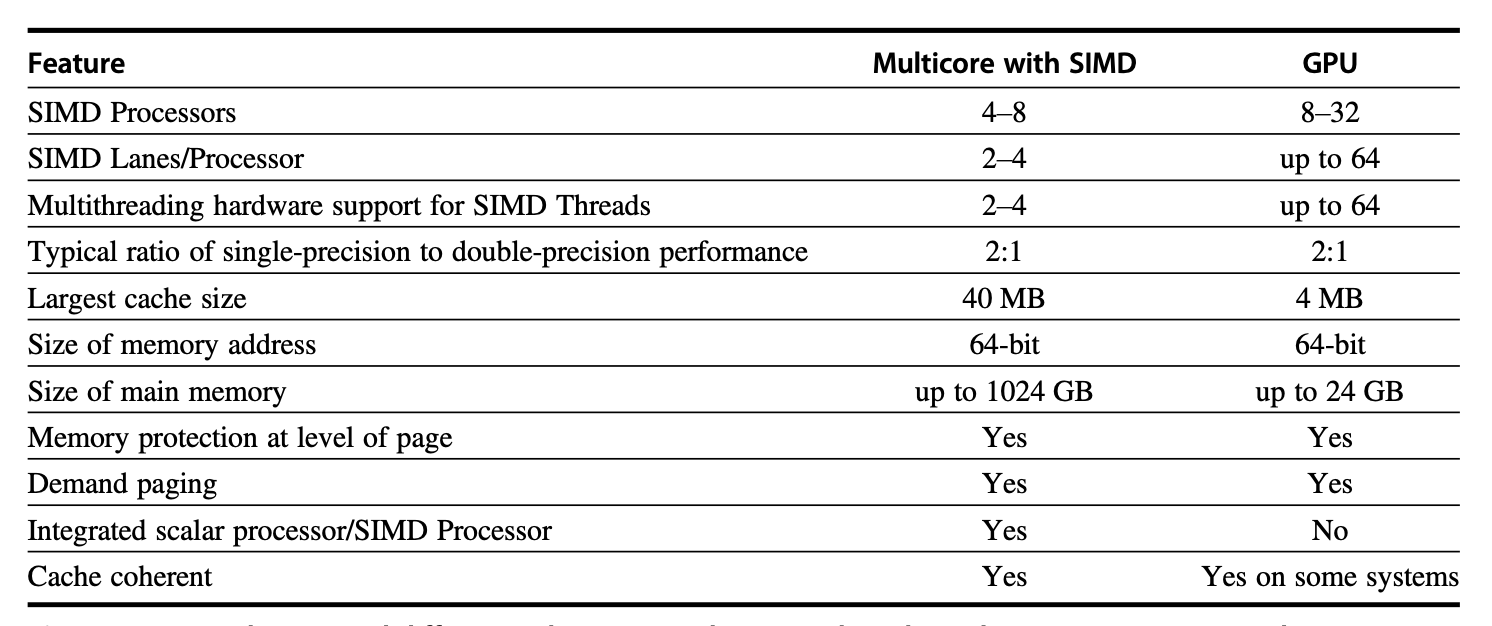
GPU vs Multimedia SIMD¶
GPU和多媒体SIMD的区别在于,GPU是为通用计算而设计的,而多媒体SIMD是为特定应用而设计的
然而上课啥也没说,就一张图