处理器¶
约 3932 个字 88 行代码 32 张图片 预计阅读时间 21 分钟
简介¶
影响CPU性能的因素:
-
Instruction count,Determined by ISA and compiler
-
CPI and Cycle time,Determined by CPU hardware
An overview of Implementation
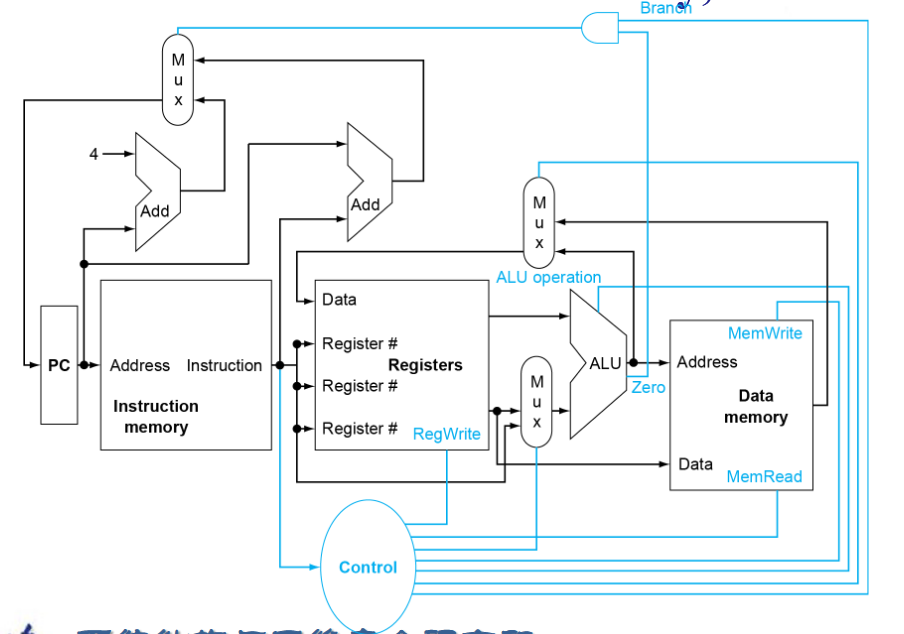
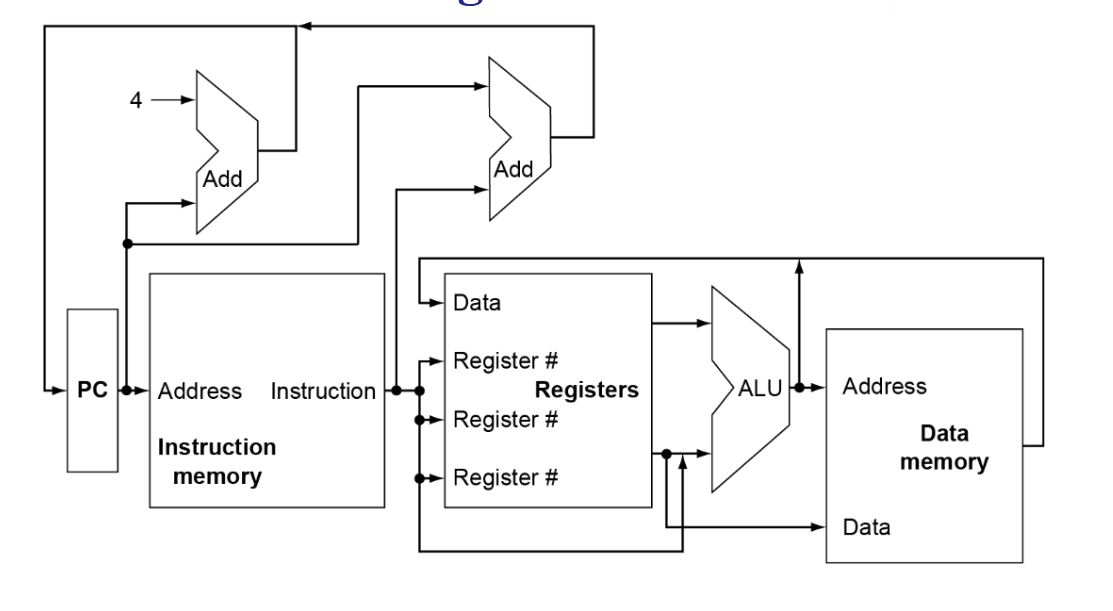 但在实际设计中,如此多的线不能交叉在一起,于是需要用到多路选择器。
但在实际设计中,如此多的线不能交叉在一起,于是需要用到多路选择器。
指令处理的步骤¶
-
提取:
-
从指令存储器中获取指令。
- 解释:从存储指令的内存中读取当前需要执行的指令。
-
修改程序计数器(PC)以指向下一条指令。
-
-
指令解码与读取操作数:
- 将指令转化为机器控制命令。
- 读取寄存器中的操作数,无论是否使用。
-
执行控制:
- 控制对应算术逻辑单元(ALU)操作的实现。
-
内存访问:
- 从内存中读取或写入数据。
- 解释:执行数据的加载(load)或存储(store)操作。
- 仅限于加载/存储指令(ld/sd)。
- 从内存中读取或写入数据。
-
将结果写入寄存器:
- 如果是 R 型指令,ALU 的结果写入 rd。
- 解释:对于 R 型指令,执行 ALU 操作后将结果存储到目标寄存器 rd 中。
- 如果是 I 型指令,内存数据写入 rd。
- 解释:对于 I 型指令,将从内存读取的数据存储到目标寄存器 rd 中。
- 如果是 R 型指令,ALU 的结果写入 rd。
-
分支指令修改 PC:
- 解释:对于分支指令,根据条件判断结果修改程序计数器,以跳转到指定指令地址。
单周期CPU¶
Datapath 与 Cpu_ctrl¶
不多说,直接上图:
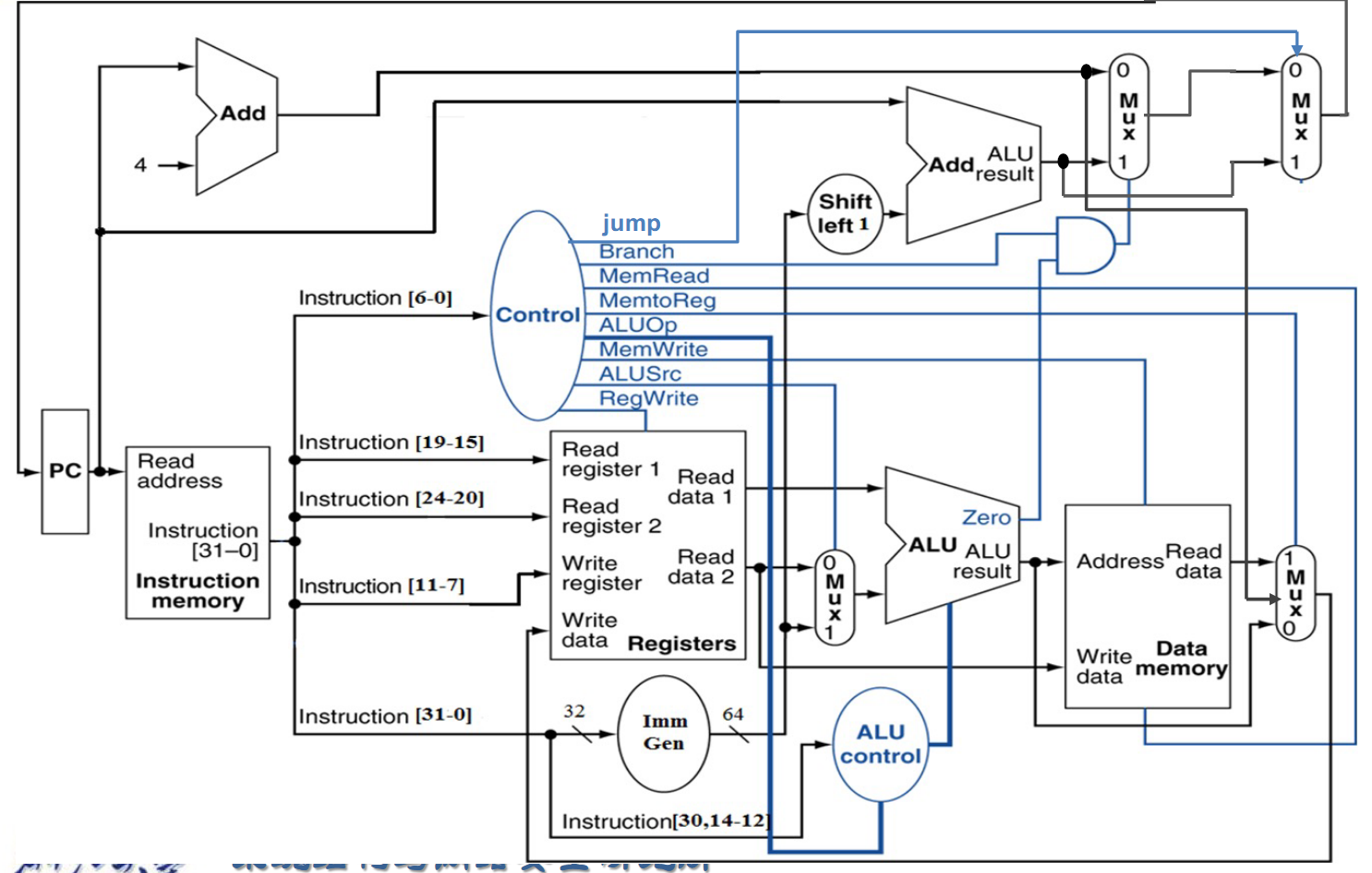
下面对图中的一些部分作说明:
-
PC:基地址
-
Instruction Memory:存放了许多指令,根据PC的地址读取相应指令
-
Registers:寄存器处理的中心,负责读取寄存器与向寄存器写入内容的功能
-
ImmGen: 负责将立即数填充为64位
-
ALU:承担了所有的运算操作,例如地址加减,
beq里面判断是否等于0,寄存器的值加减等。 -
Data Memory:内存,与
ld,sd等指令密切相关。
另外,控制信号的说明如下:
-
RegWrite:控制是否向Write Register写入数据
-
ALUSrc :控制选择Read data2还是立即数
-
ALU operation: 控制ALU进行加法,减法还是set less than什么的
-
Branch:控制这个Mux的信号,检测到指令是跳转的时候控制选择器选择立即数+PC基址。
-
jump:jal指令的信号,效果同上
-
MemRead: 控制Data Memory是否要从Address地方读取出数据
-
MemWrite: 顾名思义,同上。
-
MemtoReg: 是一个两位的信号,解释在如下:

下面展开具体分析
Datapath¶
R型指令¶
🌰
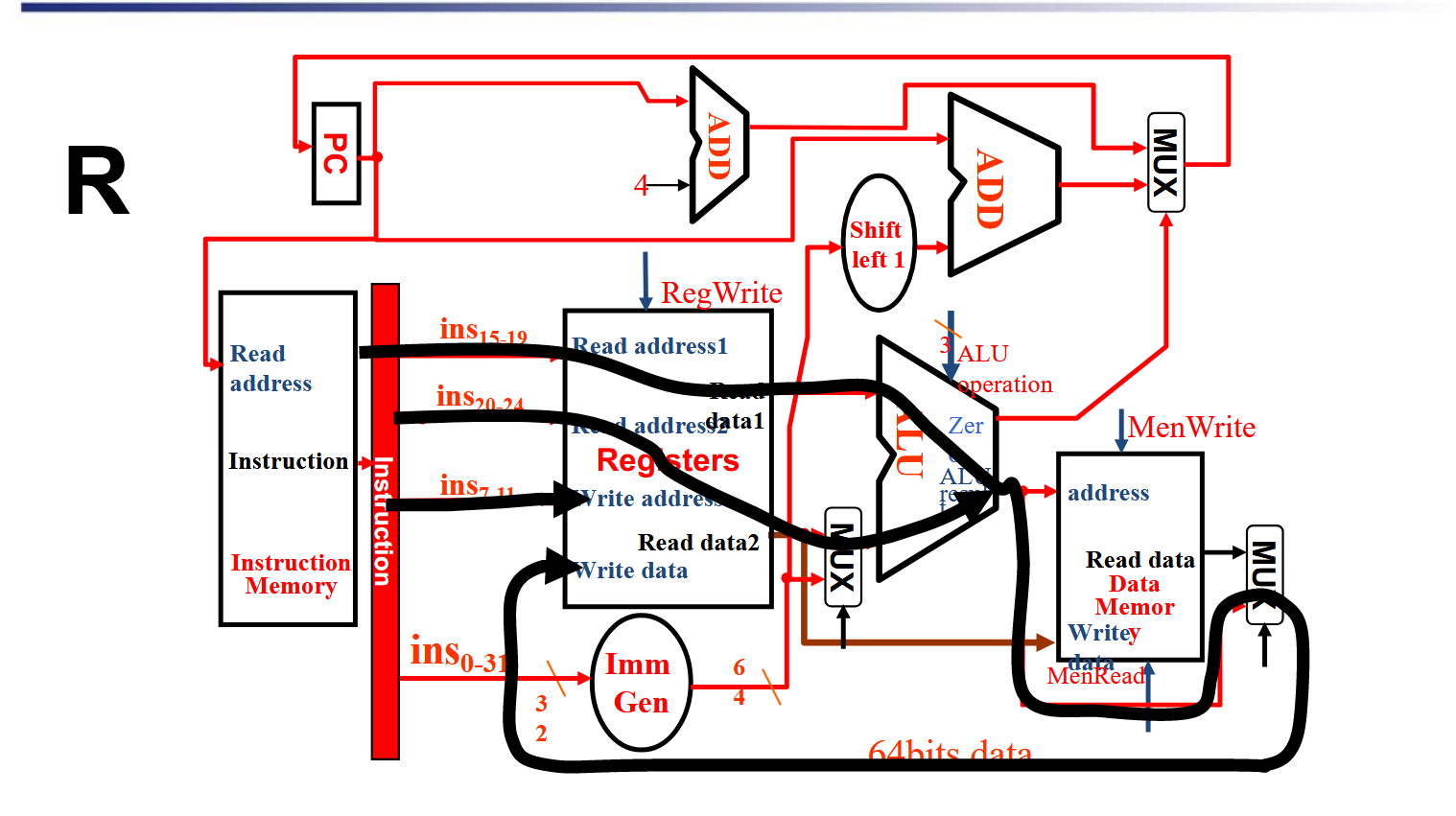
解析
先看Registers。从\(ins_{15-19}\)读取rs1寄存器的值,从\(ins_{20-24}\)读取rs2的值 ,目标寄存器为rd.控制mux选择Read data2,ALU作相应运算(比如add)后直接绕过内存,Mux选择来自ALU的数据,写入rd中。
I型指令¶
🌰
解析
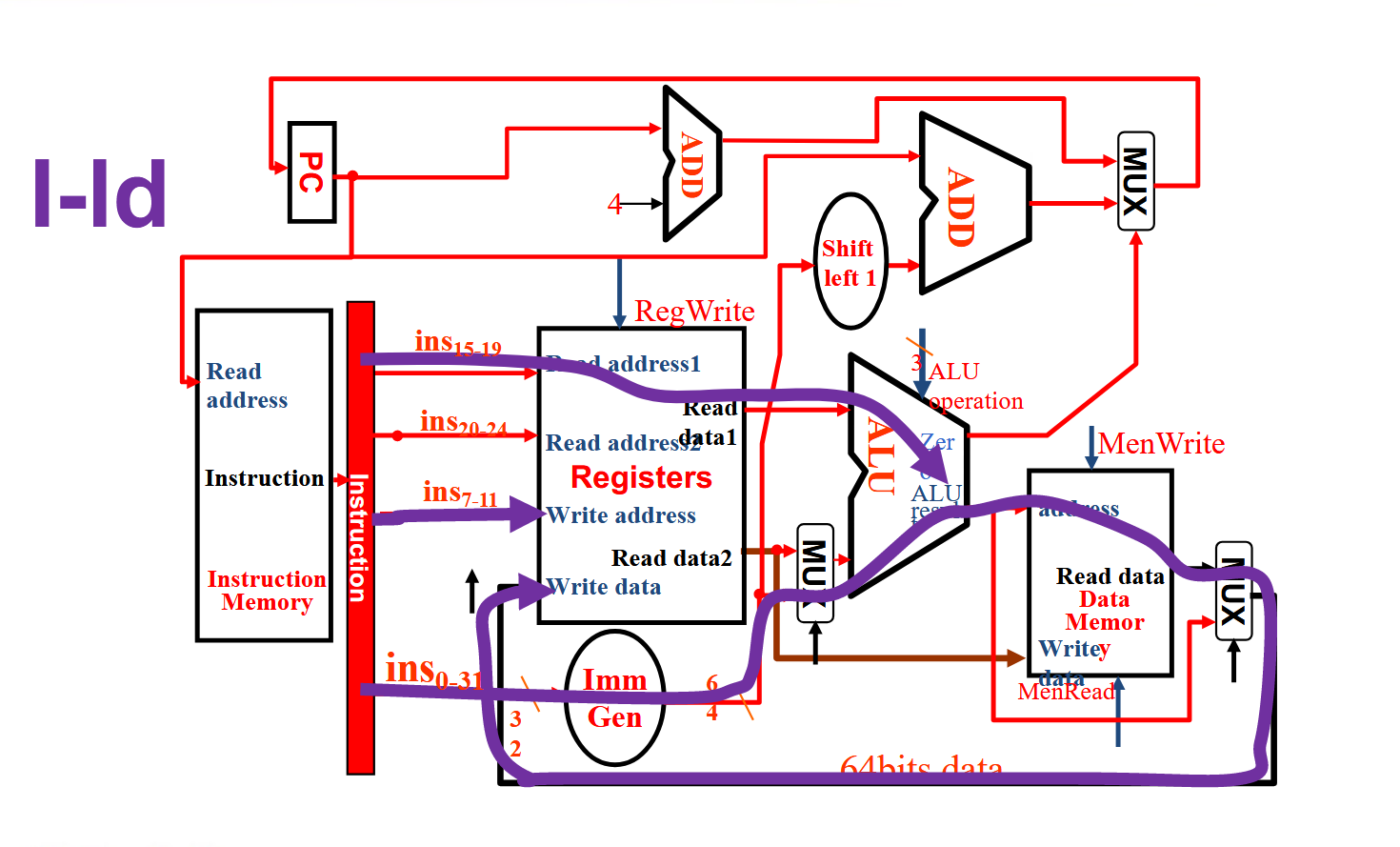
图中以ld为例。ld需要从内存读取一个值,存到目标寄存器中。 重复的话不多说,我们拿了一个rs1,一个rd,一个imm,效果就是ld rd,imm(rs1).为了实现这一效果,我们控制第一个Mux 选择扩展后的立即数,与Read data1作加法后作为内存读取的address,读出来的Read data通过多路选择器存回rd。
S型指令¶
🌰

解析
图中以sd为例。从\(ins_{15-19}\)读取rs1内容,从\(ins_{20-24}\)读取rs2的值,再来一个立即数imm, 最终的效果就是sd rs2,imm(rs1). 其他部分都和ld差不多,除了现在从内存读数据变成向内存存数据了,也不需要再写回寄存器了。
SB型指令¶
🌰
解析
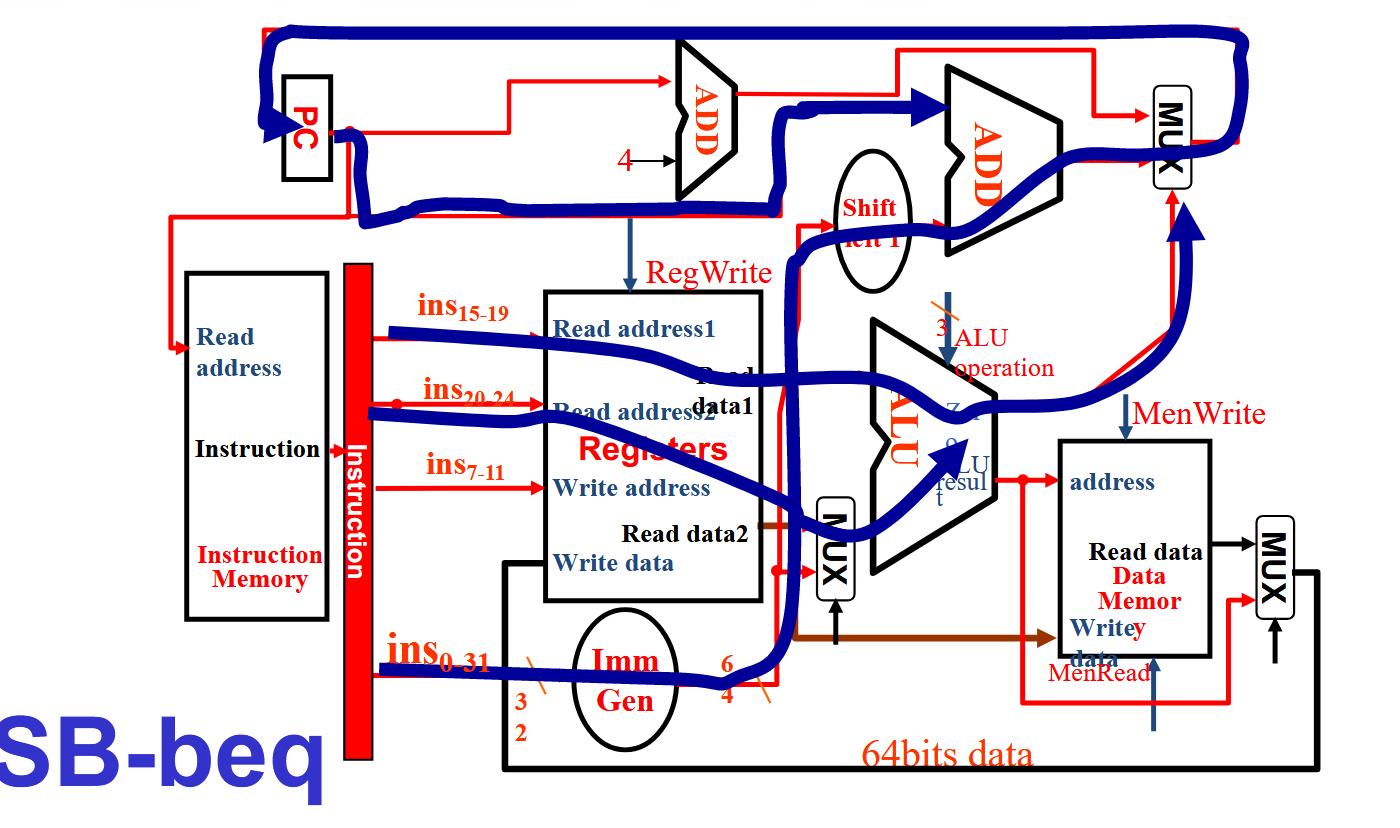
beq我们也很熟悉,就是branch if equal🐎,那么跳转到哪里呢?在RISC-V中是一个立即数,实际上去的是PC基址加上立即数的地方。知道了这个 ,我们再来看图。先取两个寄存器作比较,如果满足条件,那么ALU的zero传给上面的MUX一个信号:这MUX能取PC基址加拓展立即数吗我请问了。 如果不行那就选择PC+4,也就是下一条指令的地址。不管怎样,PC来到了一个新的地址。
J-Jal¶
🌰

解析
Jal其实值得关注的也就是一条从PC,到ADD(PC,4),再经过MUX到Registers的地方。这是什么呢?😲!这不就是jal x1,100里面把下一条指令的地址 放到x1地方吗?至于其他,基本上和SB型指令一样了。
Cpu_ctrl¶

这便是各种情况下每个控制信号的情况。可以发现,除了ALU,其他所有信号在指令类型(可以通过opcode判断)确定时就确定了。ALU由于在R型指令时可能 执行多种操作,所以不确定。这个时候前人设计出了二级译码器。
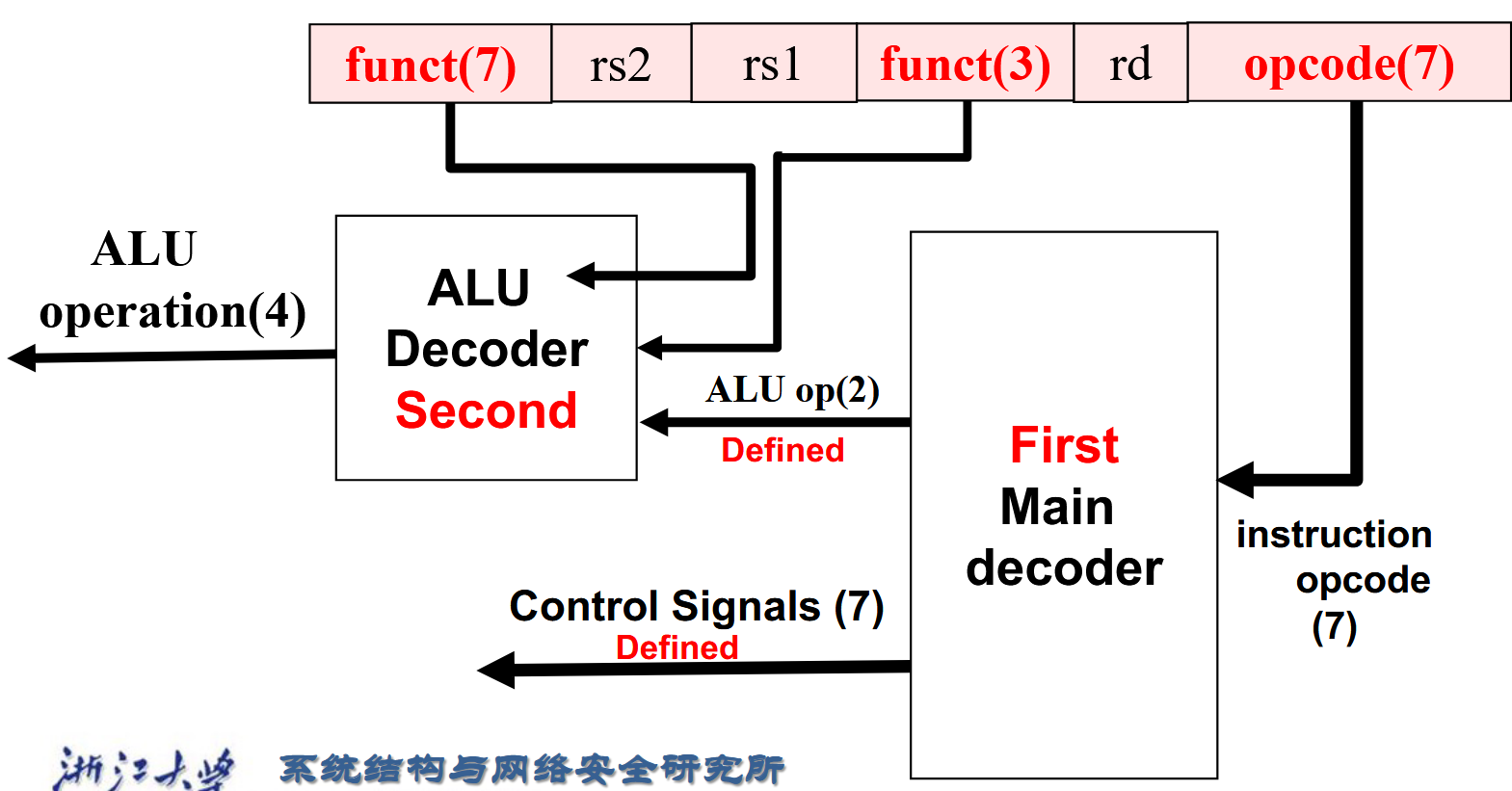
Main Decoder¶
Main Decoder其实很简单,根据opcode把能赋值的先赋值了。
ALU Decoder¶
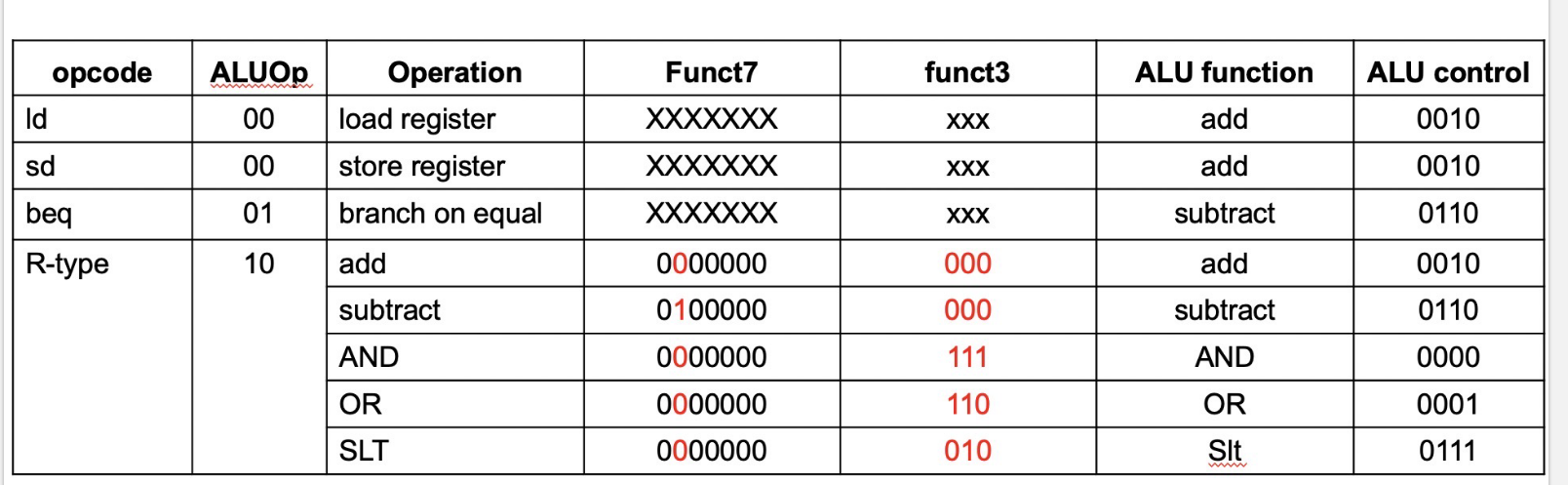
根据标红的那几位就可以判断出ALU运算的种类。
Code¶
module SCPU_ctrl(
input [4:0]OPcode, //Opcode------inst[6:2]
input [2:0]Fun3, //Function-----inst[14:12]
input Fun7, //Function-----inst[30]
input MIO_ready, //CPU Wait
output reg [1:0]ImmSel,
output reg ALUSrc_B,
output reg [1:0]MemtoReg,
output reg Jump,
output reg Branch,
output reg RegWrite,
output reg MemRW,
output reg [2:0]ALU_Control,
output reg CPU_MIO
);
wire [3:0] Fun;
reg [1:0] ALUop;
always@(*) begin
case(OPcode)
5'b01100: begin ALUop = 2'b10; Branch = 0; Jump = 0; ImmSel = 2'b00; ALUSrc_B = 0; MemRW = 0; RegWrite = 1; MemtoReg = 2'b00; end //ALU
5'b00000: begin ALUop = 2'b00; Branch = 0; Jump = 0; ImmSel = 2'b00; ALUSrc_B = 1; MemRW = 0; RegWrite = 1; MemtoReg = 2'b01; end //load
5'b01000: begin ALUop = 2'b00; Branch = 0; Jump = 0; ImmSel = 2'b01; ALUSrc_B = 1; MemRW = 1; RegWrite = 0; MemtoReg = 2'b00; end //store
5'b11000: begin ALUop = 2'b01; Branch = 1; Jump = 0; ImmSel = 2'b10; ALUSrc_B = 0; MemRW = 0; RegWrite = 0; MemtoReg = 2'b00; end //beq
5'b11011: begin ALUop = 2'b00; Branch = 0; Jump = 1; ImmSel = 2'b11; ALUSrc_B = 1; MemRW = 0; RegWrite = 1; MemtoReg = 2'b10; end //jump
5'b00100: begin ALUop = 2'b11; Branch = 0; Jump = 0; ImmSel = 2'b00; ALUSrc_B = 1; MemRW = 0; RegWrite = 1; MemtoReg = 2'b00; end //ALUi
default: begin ALUop = 2'b00; Branch = 0; Jump = 0; ImmSel = 2'b00; ALUSrc_B = 0; MemRW = 0; RegWrite = 0; MemtoReg = 2'b00; end
endcase
end
assign Fun = {Fun3,Fun7};
always @* begin
case(ALUop)
2'b00: ALU_Control = 3'b010 ; //add load store
2'b01: ALU_Control = 3'b110 ; //sub beq
2'b10:
case(Fun)
4'b0000: ALU_Control = 3'b010 ; //add
4'b0001: ALU_Control = 3'b110 ; //sub
4'b1110: ALU_Control = 3'b000 ; //and
4'b1100: ALU_Control = 3'b001 ; //or
4'b0100: ALU_Control = 3'b111 ; //slt
4'b1010: ALU_Control = 3'b101 ; //srl
4'b1000: ALU_Control = 3'b011 ; //xor
default: ALU_Control=3'bx;
endcase
2'b11:
case(Fun3)
3'b000: ALU_Control = 3'b010; //addi
3'b010: ALU_Control = 3'b111; //slti
3'b100: ALU_Control = 3'b011; //xori
3'b110: ALU_Control = 3'b001; //ori
3'b111: ALU_Control = 3'b000; //andi
3'b101: ALU_Control = 3'b101; //srli
default: ALU_Control=3'bx;
endcase
endcase
end
endmodule
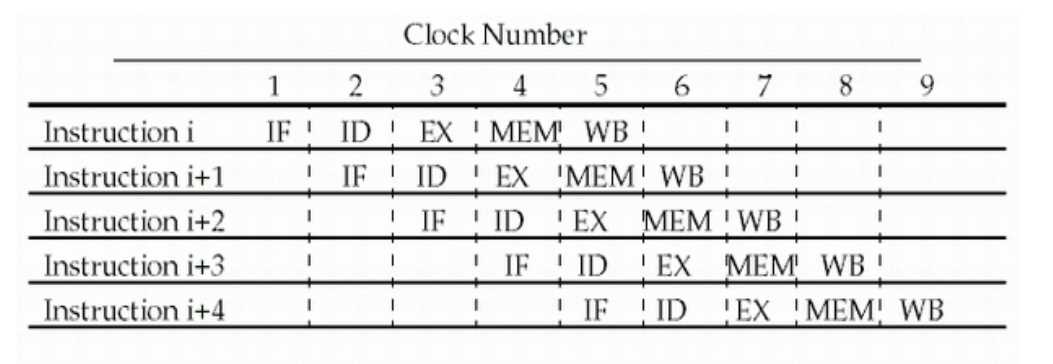
流水线CPU¶
采用流水线的思想,尽可能并行进行任务。
阶段¶
-
IF:Instruction fetch from memory
-
ID:Instruction decode and register read
-
EX:Execute operation or calculate address
-
MEM:Access memory operand
-
WB:Write result back to register
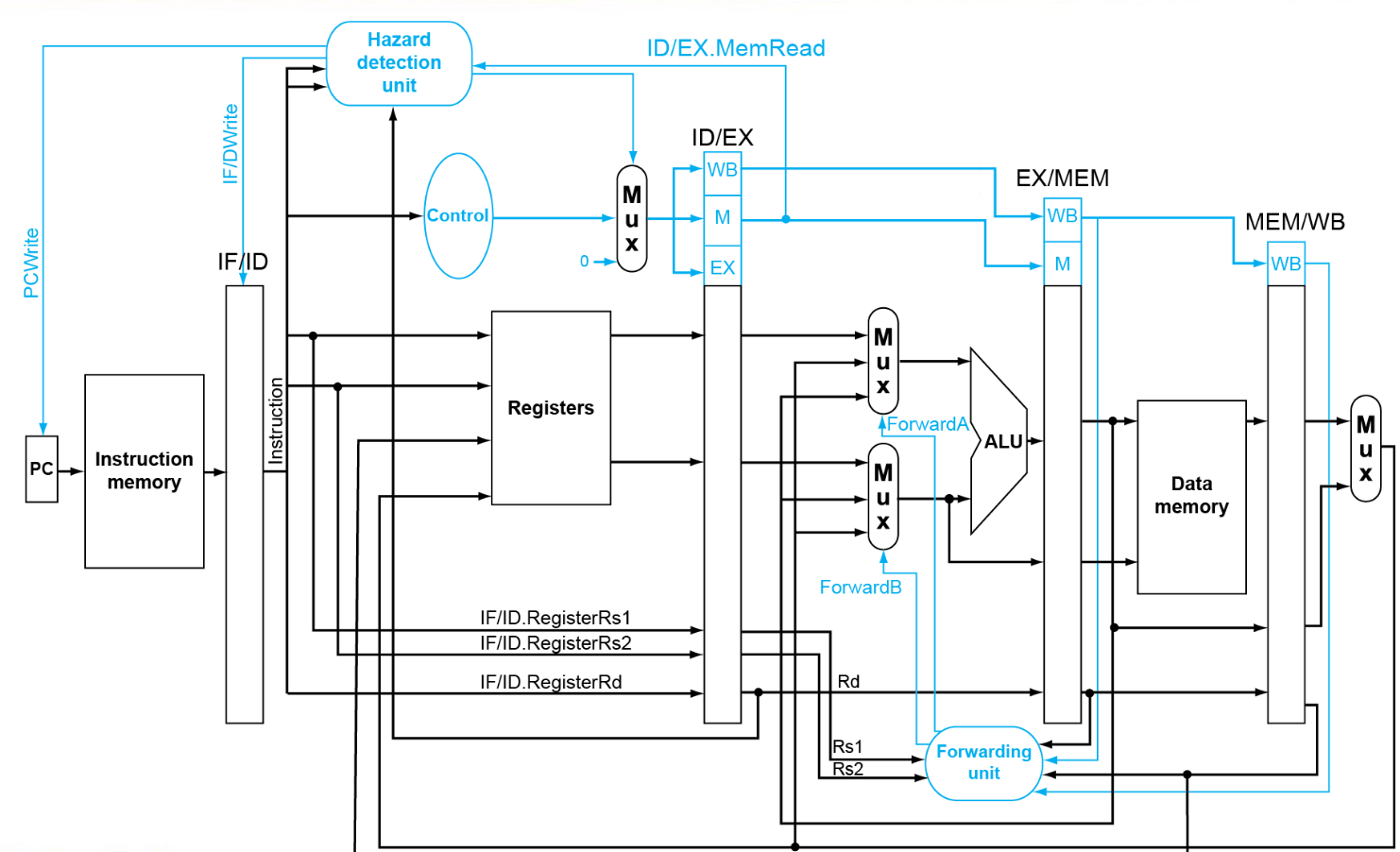
结构:数据通路与控制¶
汇总图
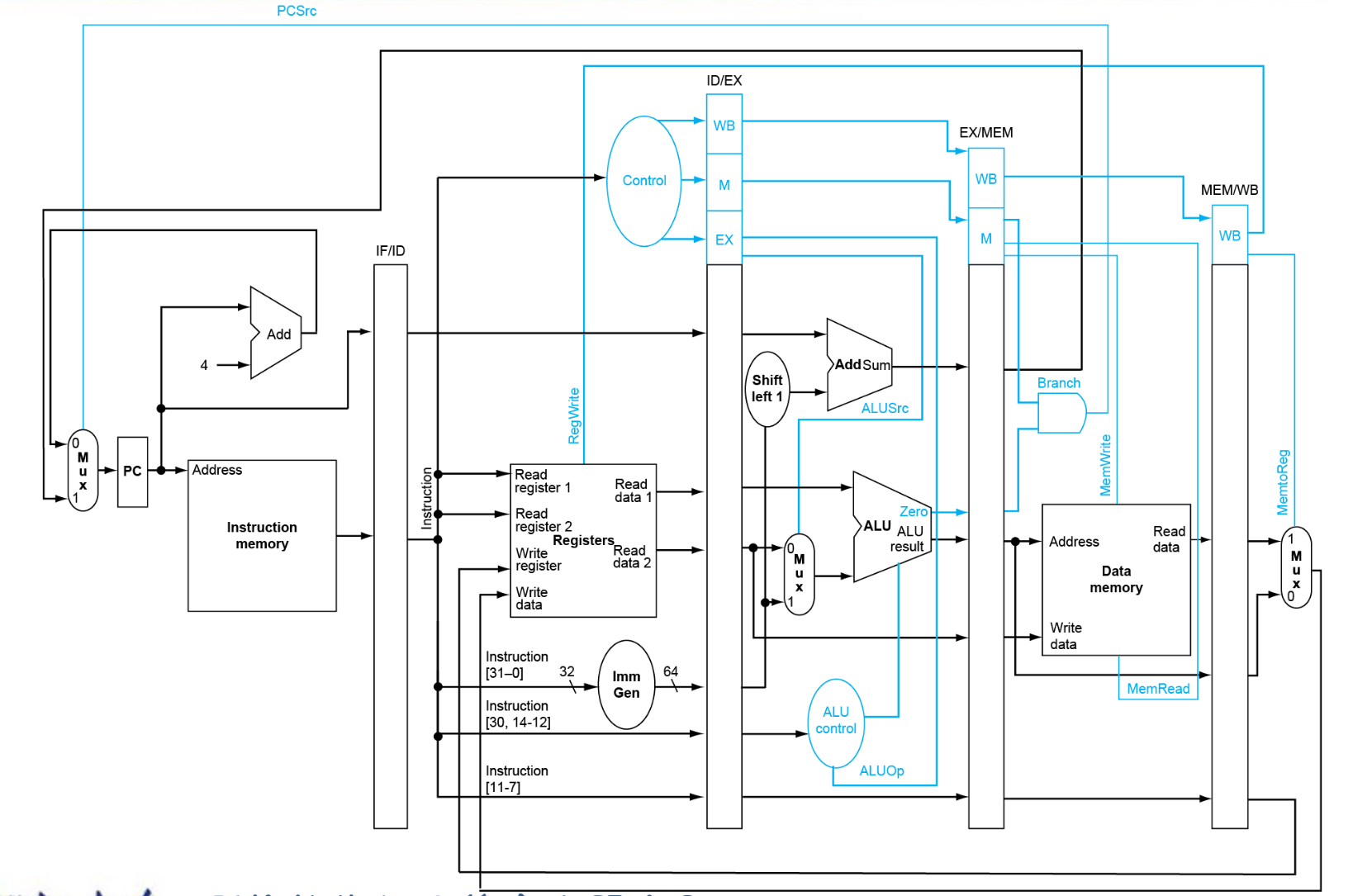
中间的长条状是寄存器,存了上一个指令的各种信息。下面来作具体解释:
-
IF/ID:这一部分的寄存器中存储的是指令本身与指令的地址,因为在ID中需要进行指令的解码,但是IF马上又要读下一条指令了,因此需要保存。
-
ID/EX:这一部分的寄存器中首先需要继承IF/ID中的指令与指令地址,然后需要存储的是指令的译码结果(opcode,Imm,rd编号)与寄存器的读取结果(rs1,rs2的值)等。
-
EX/MEM:这一部分的寄存器中存储的是ALU的运算结果(包括算术ALU与地址计算的ALU),以及rd编号,Branch,Jal等
-
MEM/WB:这一部分的寄存器中存储的是从内存中读取的数据,ALU计算的结果,MemToReg信号,rd编号等。
流水线中的问题与解决方案¶
https://zhuanlan.zhihu.com/p/447682231
数据冒险(Data Hazards)¶
在RISC-V架构的流水线CPU中,数据冒险通常由指令间的数据依赖引起。例如,当一条指令需要使用前一条指令的计算结果作为操作数时,就会发生数据冒险。为了解决数据冒险,RISC-V流水线常采用以下方法:
-
转发(Forwarding):将执行阶段或内存访问阶段的结果直接传递给需要该数据的指令,减少流水线暂停。
示例:
在没有转发的情况下,第2条指令必须等待第1条指令完成写回后才能执行。而通过转发,第1条指令的结果可以直接从执行阶段传递给第2条指令,避免了暂停。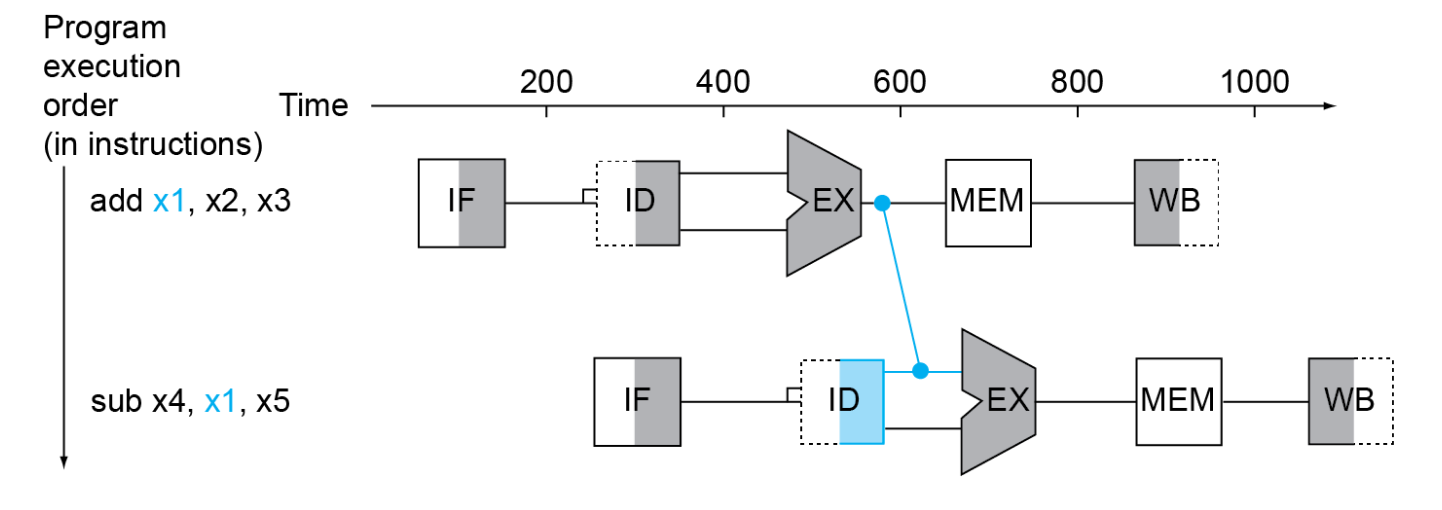
-
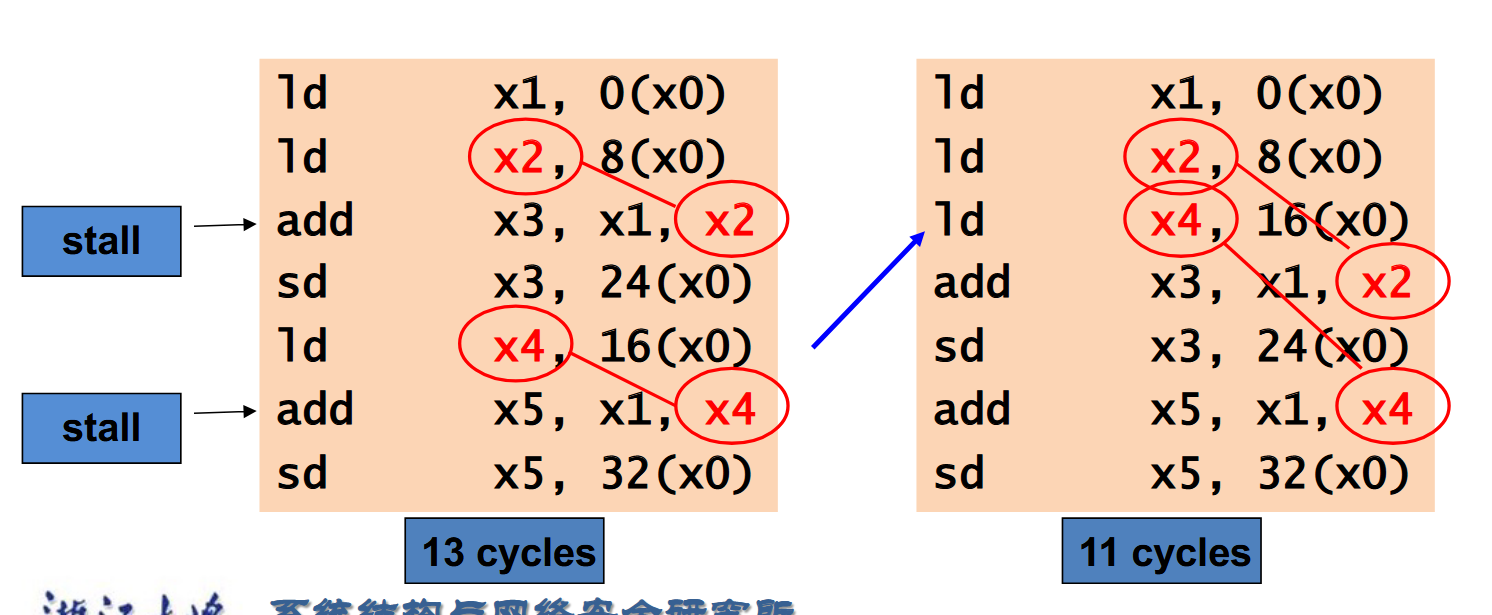
流水线暂停(Pipeline Stalls):当数据依赖无法通过转发解决时,通过插入气泡(NOP指令)来暂时停止流水线,以等待数据准备就绪。 示例:
- 指令调度:重新安排指令的执行顺序,尽量减少数据依赖带来的影响。
示例:
控制冒险(Control Hazards)¶
控制冒险主要发生在分支指令执行时,预测下一条指令的地址成为问题。RISC-V流水线通常采用以下策略来应对控制冒险:
- 分支预测(Branch Prediction):通过预测分支的走向(如静态预测或动态预测)来提前加载指令,减少因分支指令带来的流水线停顿。 示例
- 分支延迟槽(Branch Delay Slot):在分支指令之后安排一条与分支结果无关的指令执行,以利用这一个周期,减少性能损失。
- 延迟分支(Delayed Branch):类似于分支延迟槽,通过调整指令调度来优化分支指令的执行。
结构冒险(Structural Hazards)¶
结构冒险是由于流水线中硬件资源的竞争引起的冲突。例如,当多个指令同时需要访问同一个内存资源时,可能会导致结构冒险。
RISC-V流水线通过以下方法缓解结构冒险:
- 资源多路复用:增加硬件资源的实例,比如多个寄存器文件端口或独立的缓存访问路径,以支持同时的资源访问需求。
- 流水线分段:将硬件资源划分为多个独立的子单元,每个子单元负责不同的流水线阶段,减少资源竞争。
- 动态调度:根据指令的资源需求动态分配硬件资源,优化资源利用率,降低结构冒险发生的概率。
其实,结构冒险在CPU硬件设计时就已经解决了,所以在使用时不需要担心。
冒险¶
冒险的检测¶
Data Hazards与Structural Hazards¶
数据冒险发生在两个指令的寄存器出现相同,也就是上一条指令的rd是下一条指令的rs1或rs2,同时还要关注Regwrite信号
检测
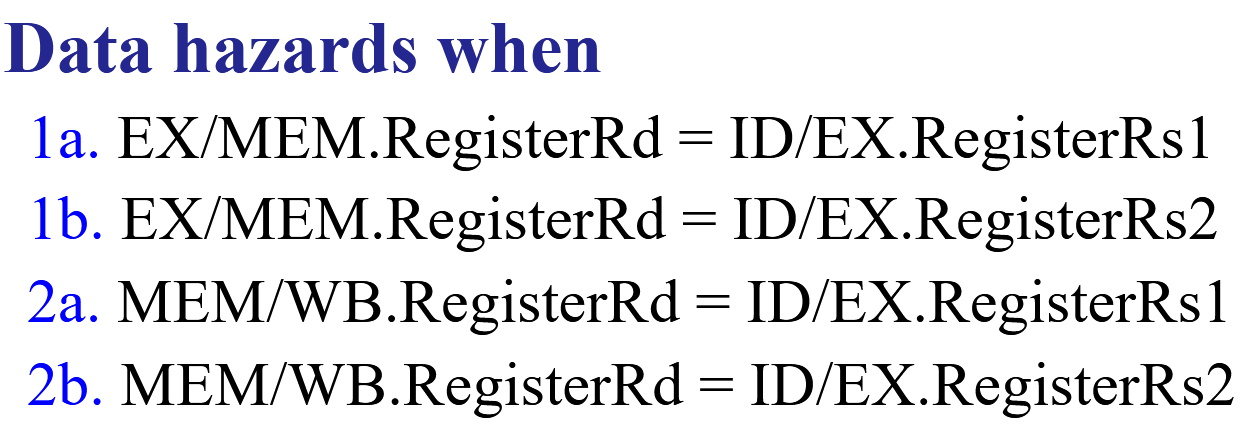
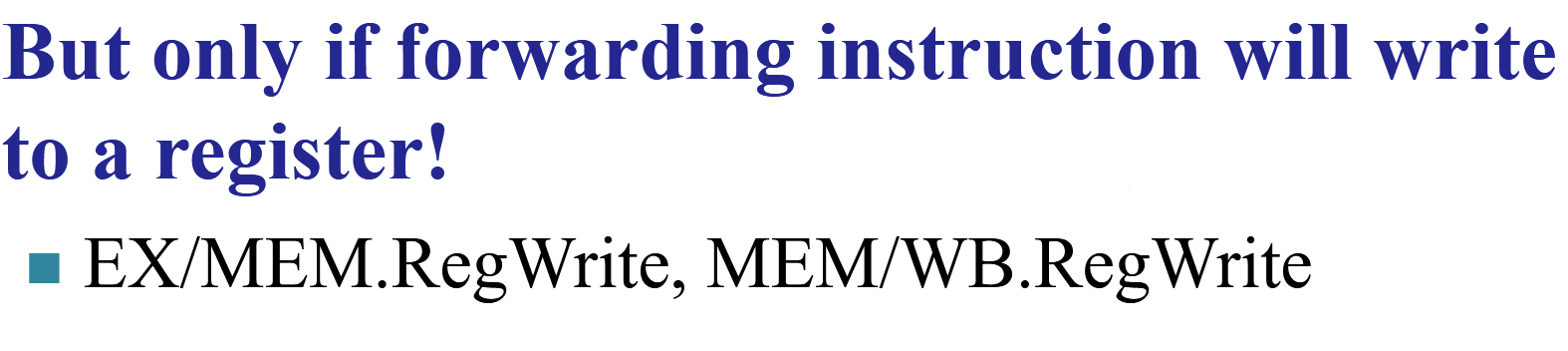
只有我们需要向rd写入数据的时候可能发生冒险

x0不需要考虑,因为不能写
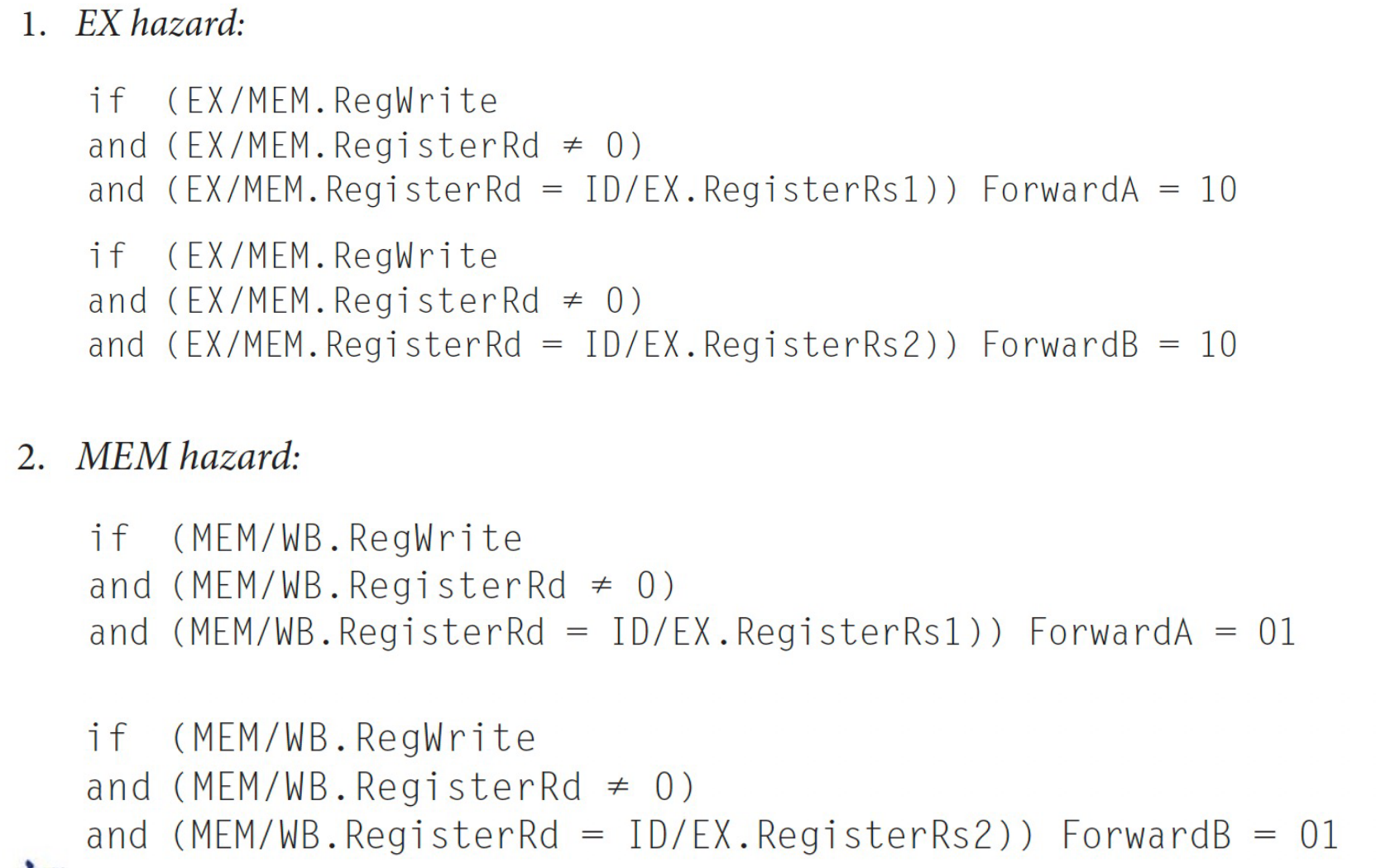
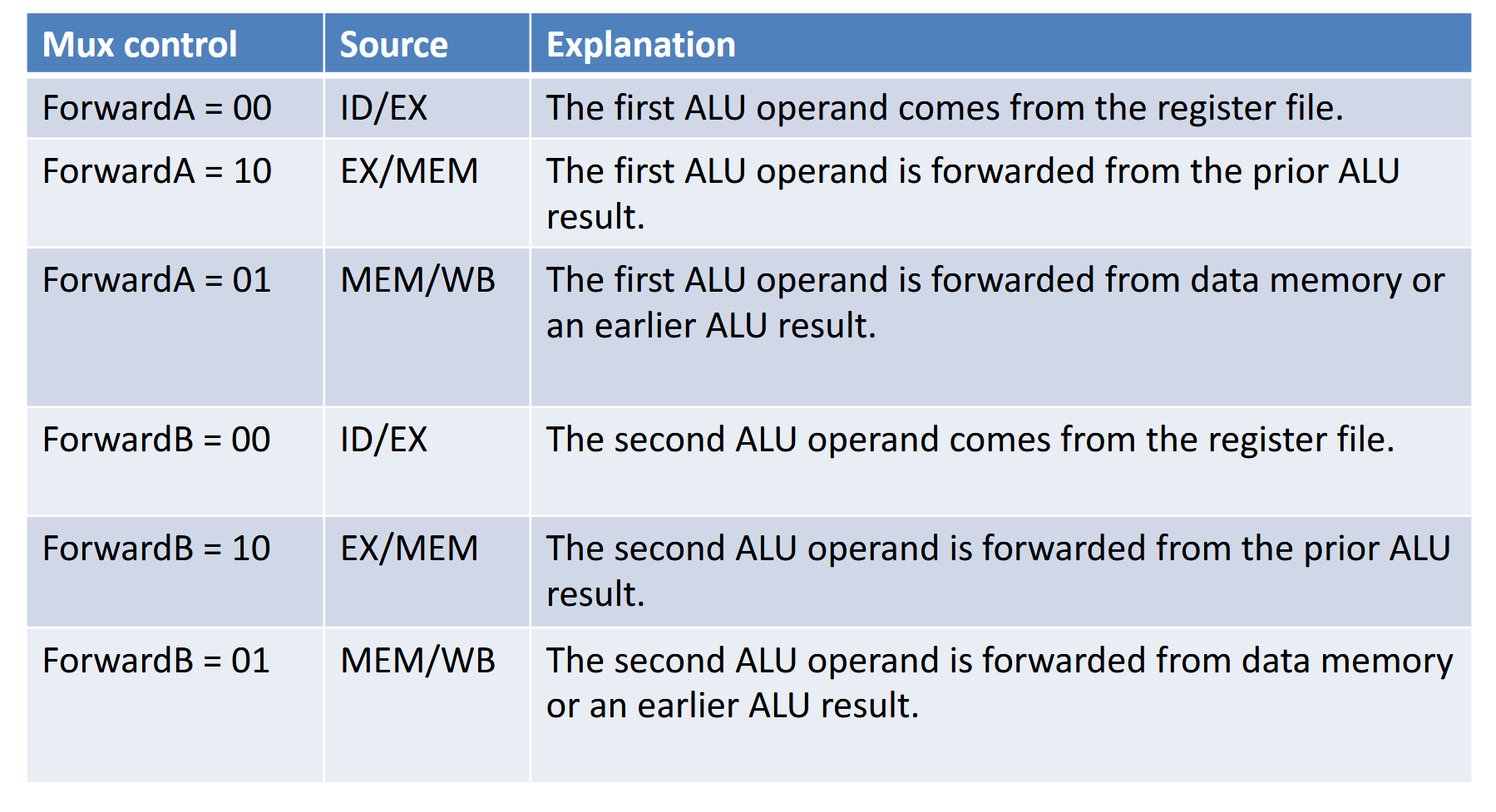
具体用逻辑来写,就是这样
Tip
这样就好了吗?
思考这样一种情况:
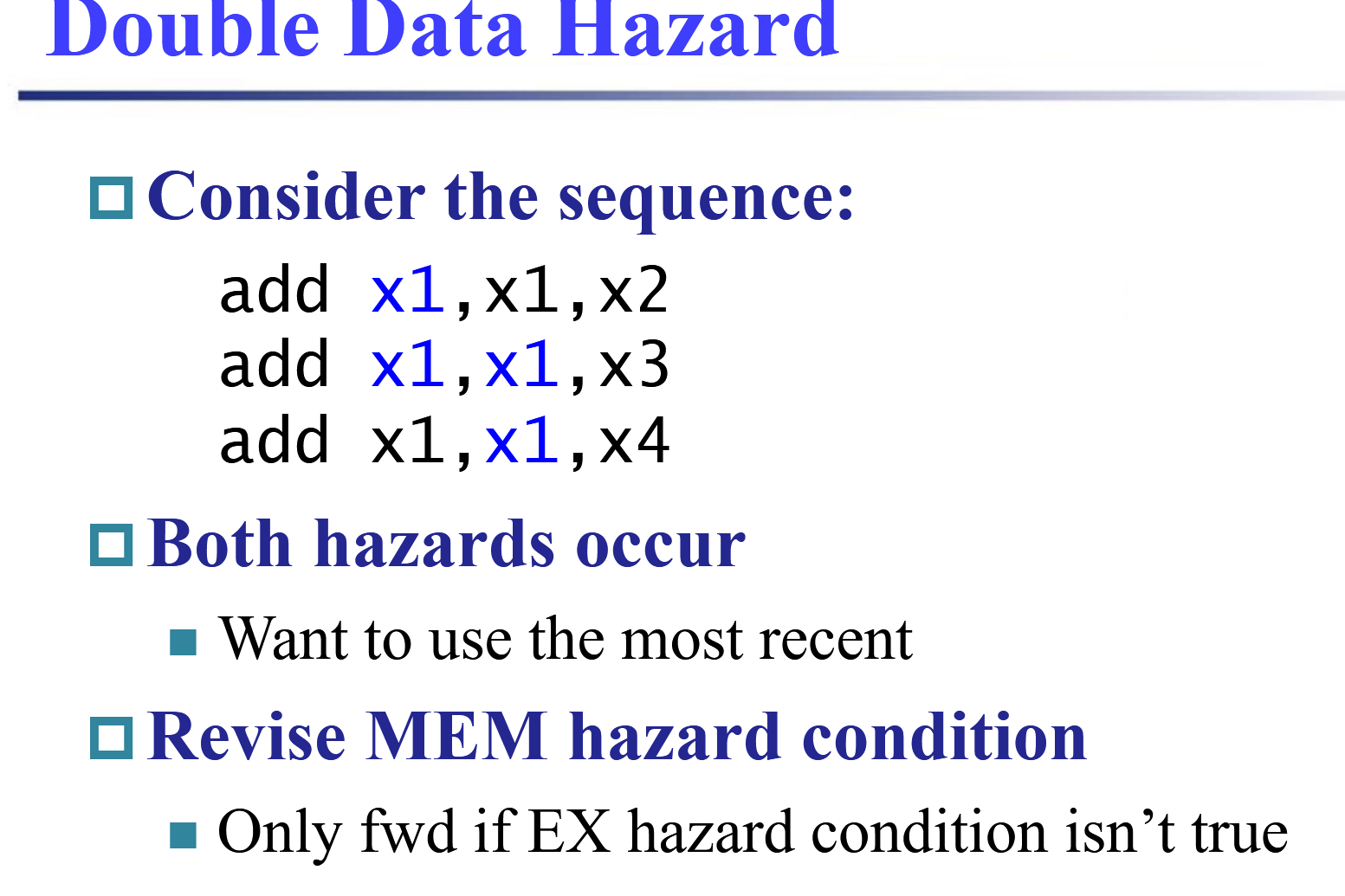
那我x1不是应该从最近的一条指令把数据旁路过来吗?
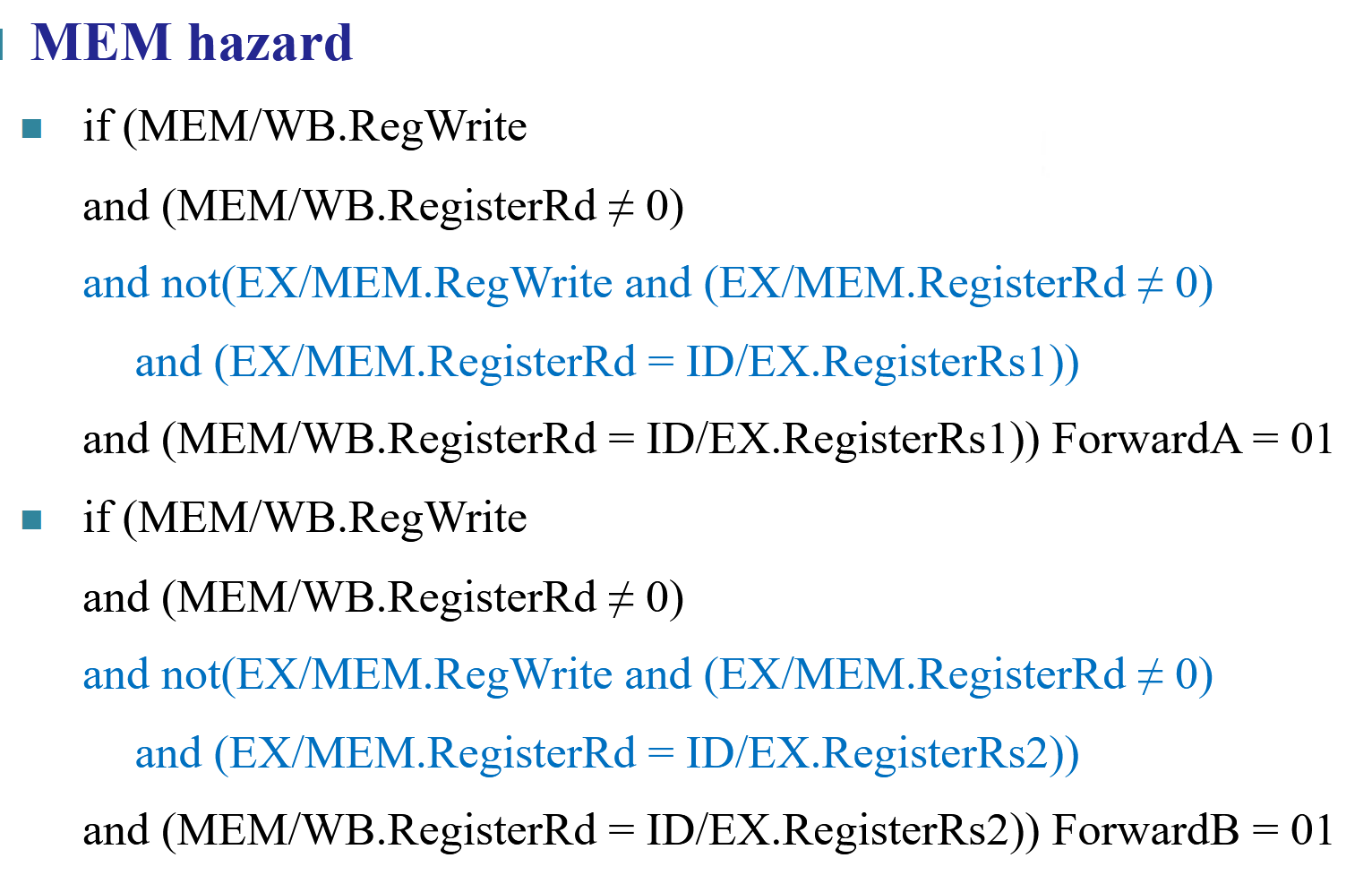
所以MEM Hazard应该是这样
Question
这样好了吗🤔?
我们来看load指令:
这样的冲突是符合EX Hazard的所有条件的,但load指令不能在这个地方旁路过来,因为在EX/MEM这个阶段load指令还没有加载到数据,所以需要等到MEM/WB阶段。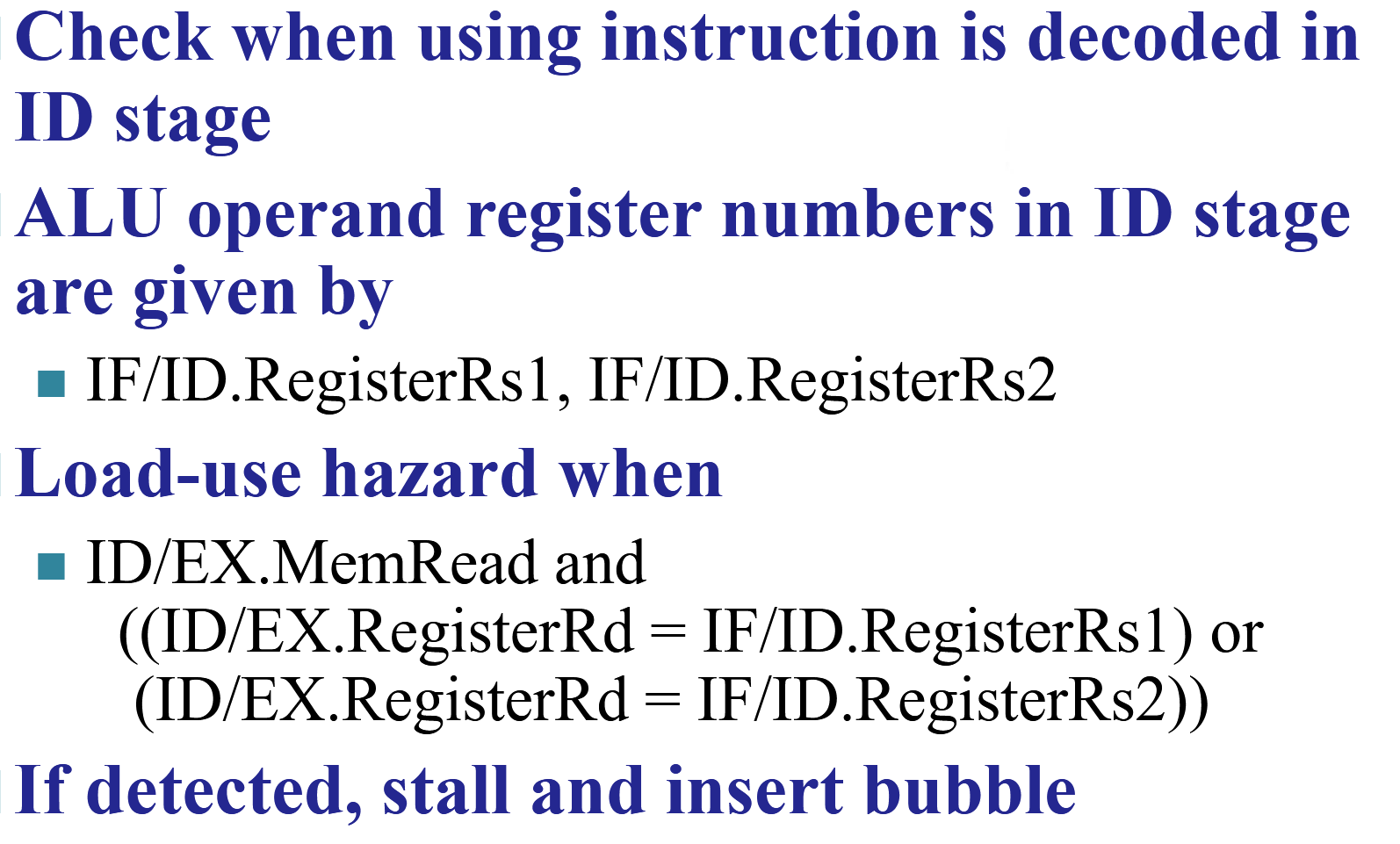
Danger
图中存在错误。IF/ID应为ID/EX,ID/EX应为EX/MEM。
总结:
Control Hazards¶
为解决控制冒险,我们可以提前计算来判断是否要跳转。
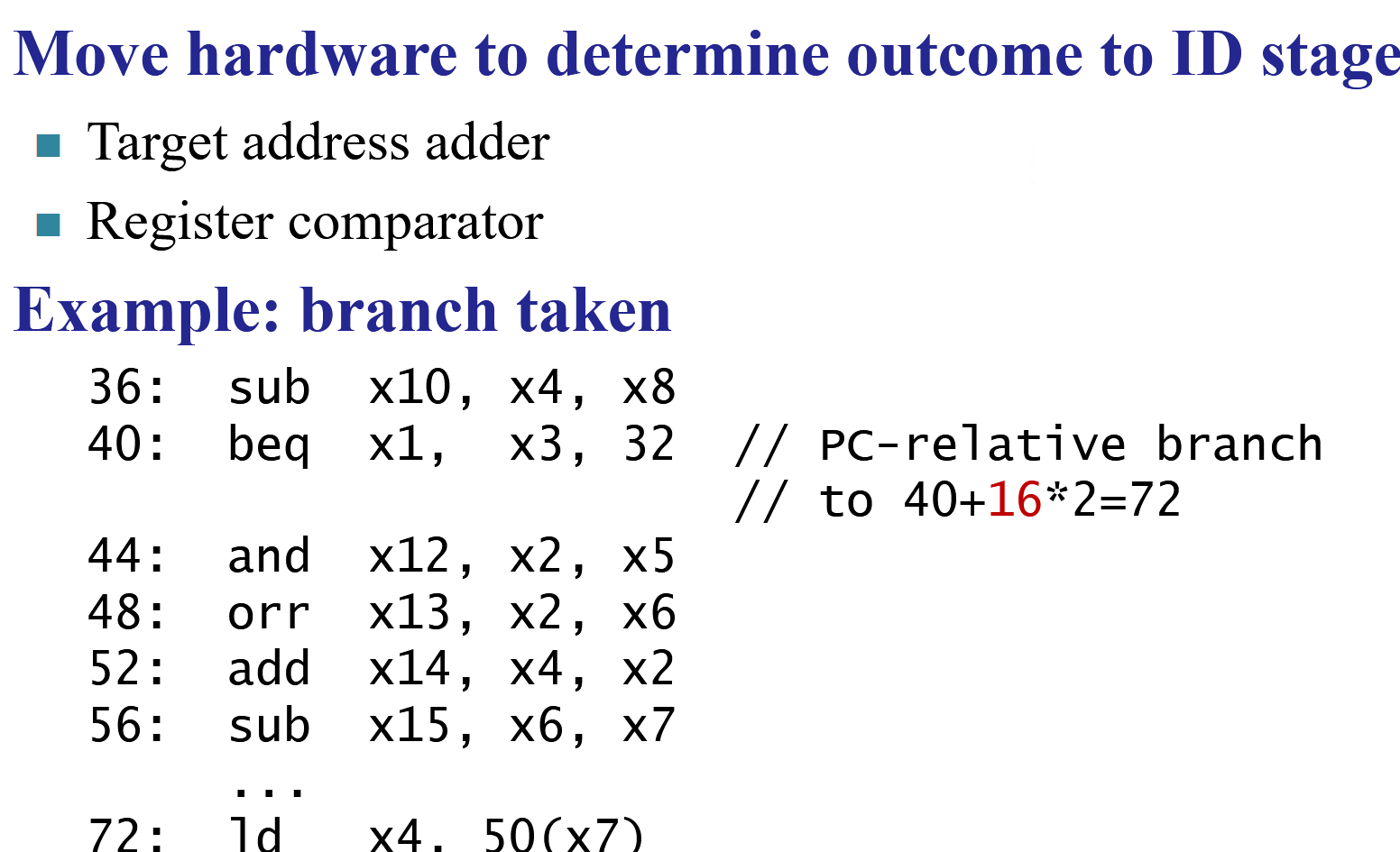
但是即便这样,我们也会浪费一个时钟。因为加入跳转成立,那本来取的下一条指令就不对了。因此,可以考虑采用Branch Prediction的方法。
这又可以分为两种:
-
Static Prediction: 静态预测,比如总是预测跳转成立,或者总是预测跳转不成立。
-
Dynamic Prediction: 动态预测,通过历史记录来预测。
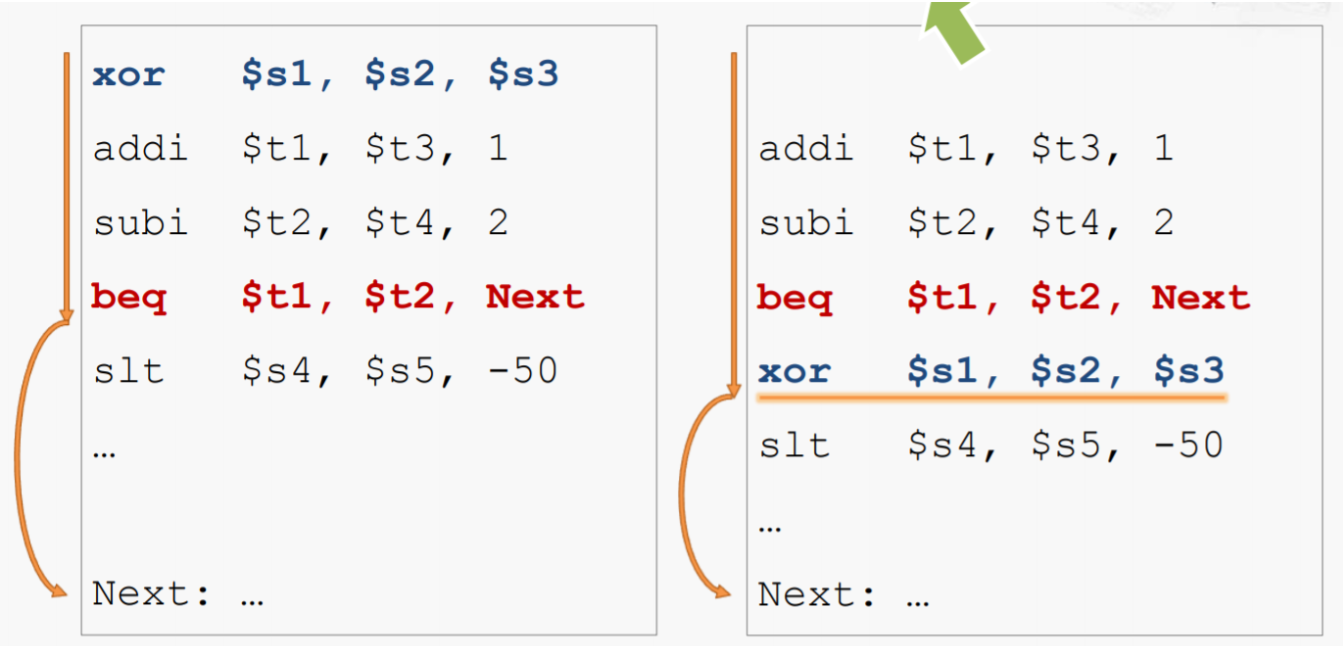
其实还有一种做法,也就是指令的重排。我们将肯定会执行的指令放在跳转指令的后面,这样即使预测错误,也不会浪费时钟周期。
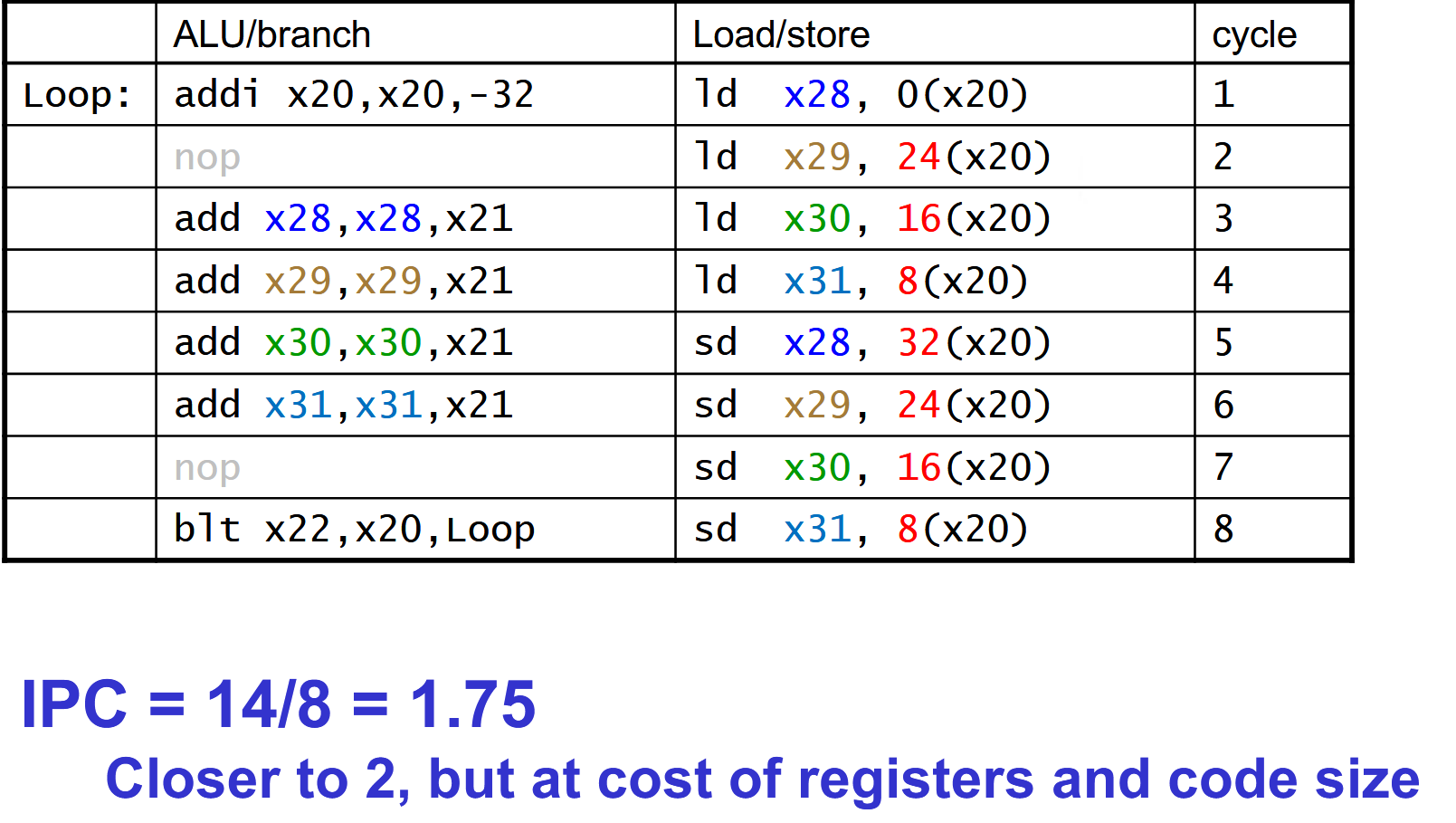
RISC-V with Static Dual Issue(并行处理两条指令)¶
通过增加寄存器,ALU与ImmGen,我们可以实现并行处理两条指令:load/store和ALU/branch指令。
CPU改造
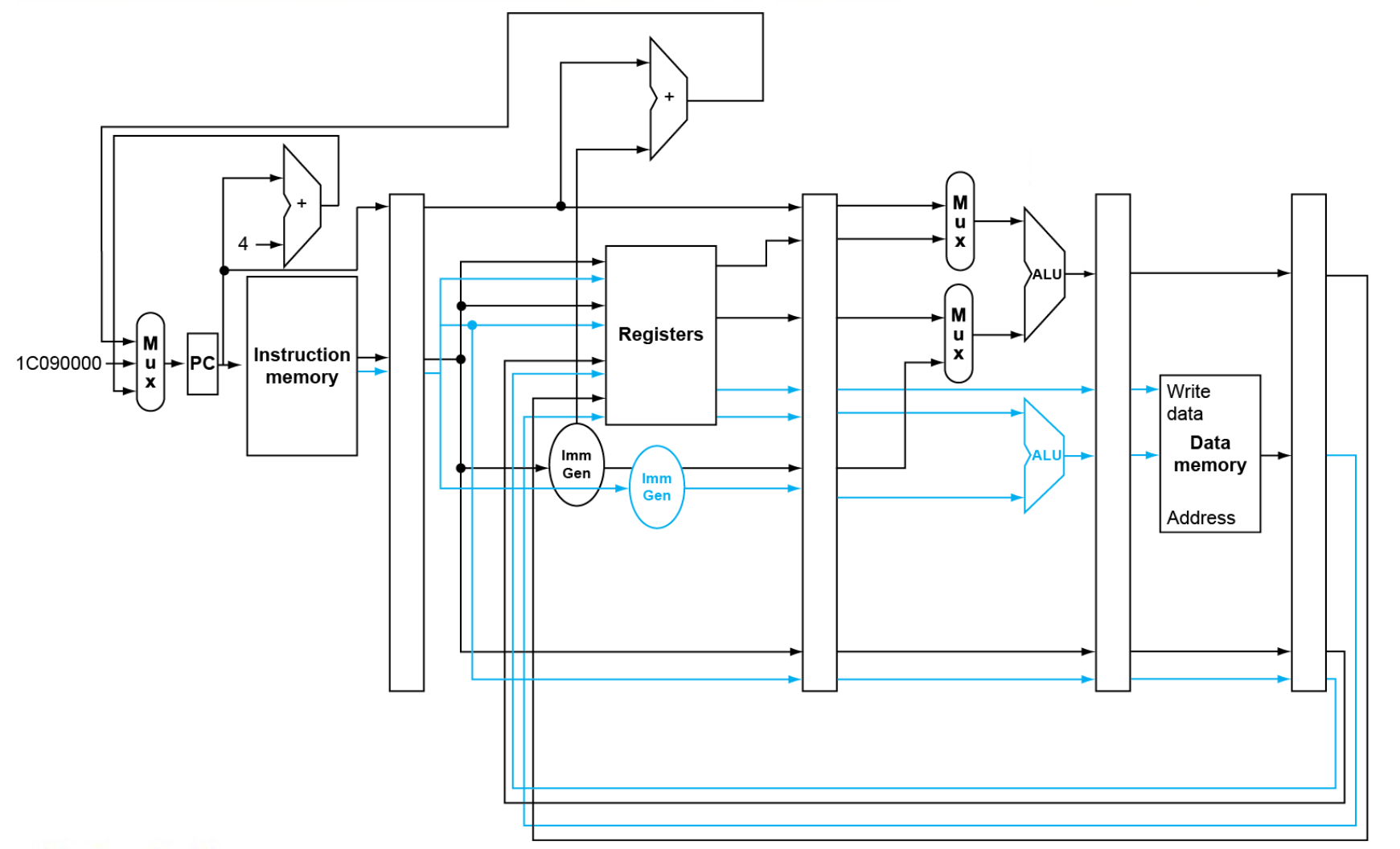
然而,并行处理这两条指令并不总是可行的。 例如
在这样两条指令中,第二条指令需要等待第一条指令的load指令执行完毕才能执行,因此无法并行处理。Loop Unrolling¶
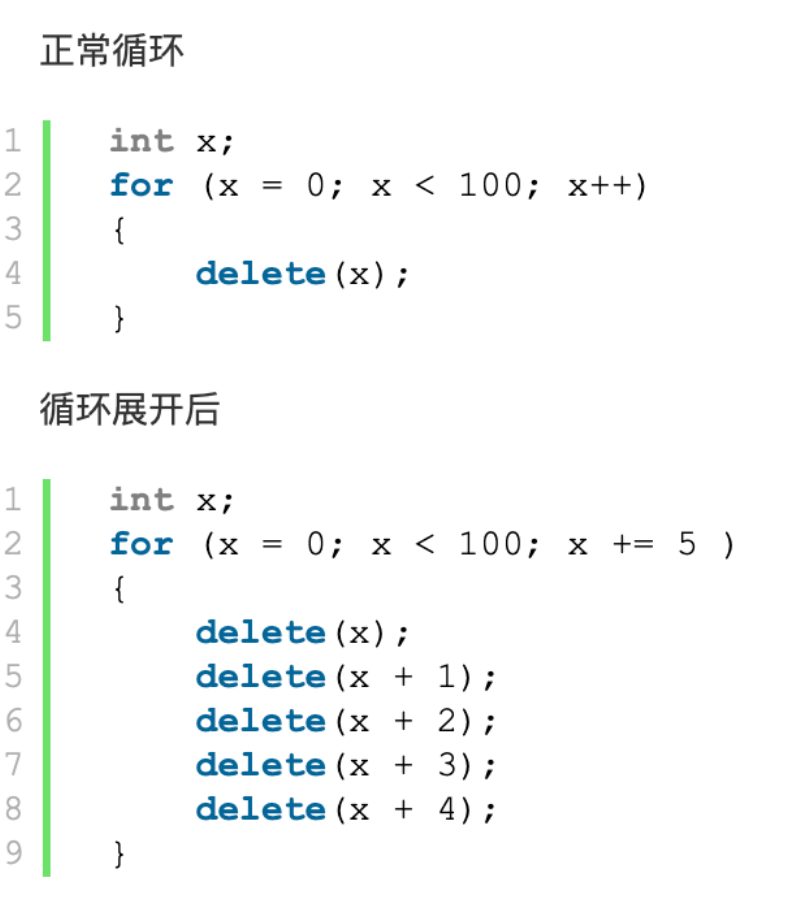
正是因为有上面那些问题,我们可以使用循环展开的思想,将一条指令拆分成多条指令,这样就可以并行处理了。
Loop: ld x31,0(x20) // x31=array element
add x31,x31,x21 // add scalar in x21
sd x31,0(x20) // store result
addi x20,x20,-8 // decrement pointer
blt x22,x20,Loop // branch if x22 < x20
上面这段代码如果要并行处理的话,为了避免冒险,结果是这样的:
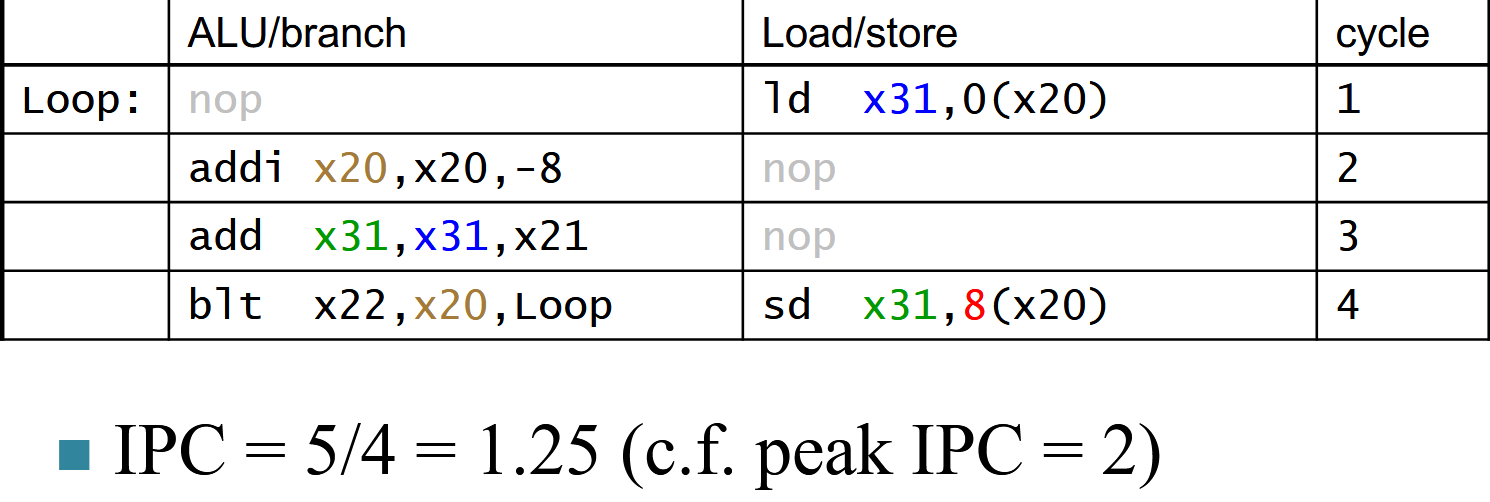
但是我们可以将循环展开,这样就可以并行处理了。也就是把原来多个循环重复执行的指令放在一起,作为一个循环。
思想相当于这样:
Dynamic Scheduling¶
动态调度是指在运行时根据指令的资源需求动态分配硬件资源,以优化资源利用率,降低结构冒险发生的概率。
-
CPU可以乱序执行指令
-
乱序执行的指令需要按照原有的顺序写入寄存器
Register Renaming¶
寄存器重命名是指将指令中的逻辑寄存器重命名为物理寄存器,以避免数据冒险。
Speculation¶
在乱序执行的过程中,我们可以猜测一些指令的执行结果,如果猜测正确,那么就可以继续执行,否则就回滚。
-
Branch Prediction: 预测分支指令的走向,提前加载指令,减少分支带来的性能损失。
-
load Speculation: 预测load指令的加载地址与加载数据,提前加载数据,减少load指令带来的性能损失。
指令中断¶
在CPU执行时,有两个原因会导致CPU work flow的改变
-
Control Flow Change: 分支指令,跳转指令等
-
Exception and Interrupts:不可预测的事件,比如除零,内存访问错误等
Exception¶
处理器内部的异常,比如overflow,undefined instruction等。
上述说法是狭义的异常,广义的异常还包括中断。
中断是指处理器外部的异常,比如时钟中断,IO中断等。
处理Exception¶
首先,CPU要知道:
-
异常发生的原因
-
哪条指令导致了异常
因此,在发生异常时,CPU会将异常原因和导致异常的指令的地址存储在一些特殊的寄存器(比如cause和epc)中。其中,cause寄存器存储异常原因,epc寄存器存储导致异常的指令的地址。
接着,CPU会跳转到异常处理程序的地址,开始处理异常。
那么怎么根据异常原因跳转到对应的异常处理程序呢?
固定地址¶
CPU先跳到一个固定地址,这个地址存储了所有异常处理程序的入口地址,然后根据异常原因选择对应的异常处理程序。
中断向量表¶
根据cause寄存器的值,选择对应的异常处理程序的地址。但是地址中存放的是Jal指令,两级跳转。
进入异常¶
当检测到异常时:
-
停止执行当前的程序流,转而从CSR寄存器mtvec定义的PC地址开始执行;
-
更新机器模式异常原因寄存器:mcause;
-
更新机器模式中断使能寄存器:mie
-
更新机器模式异常PC寄存器:mepc;
-
更新机器模式状态寄存器: mstatus;
-
更新机器模式异常值寄存器: mtval;
当然,也可能发生多个异常同时发生的情况,这时候需要根据优先级来处理。一般来说,异常的优先级是固定的,比如中断的优先级高于异常。
退出异常¶
当异常处理程序执行完毕时,在机器模式下使用mert指令返回到之前的程序流程。
流水线下的异常¶
流水线下出现异常可以看作是控制冒险的一种特殊情况,它的处理与分支预测错误的处理类似。
-
把在这条指令之前的指令执行完毕
-
把这条指令及之后的指令清空
-
跳转到异常处理程序
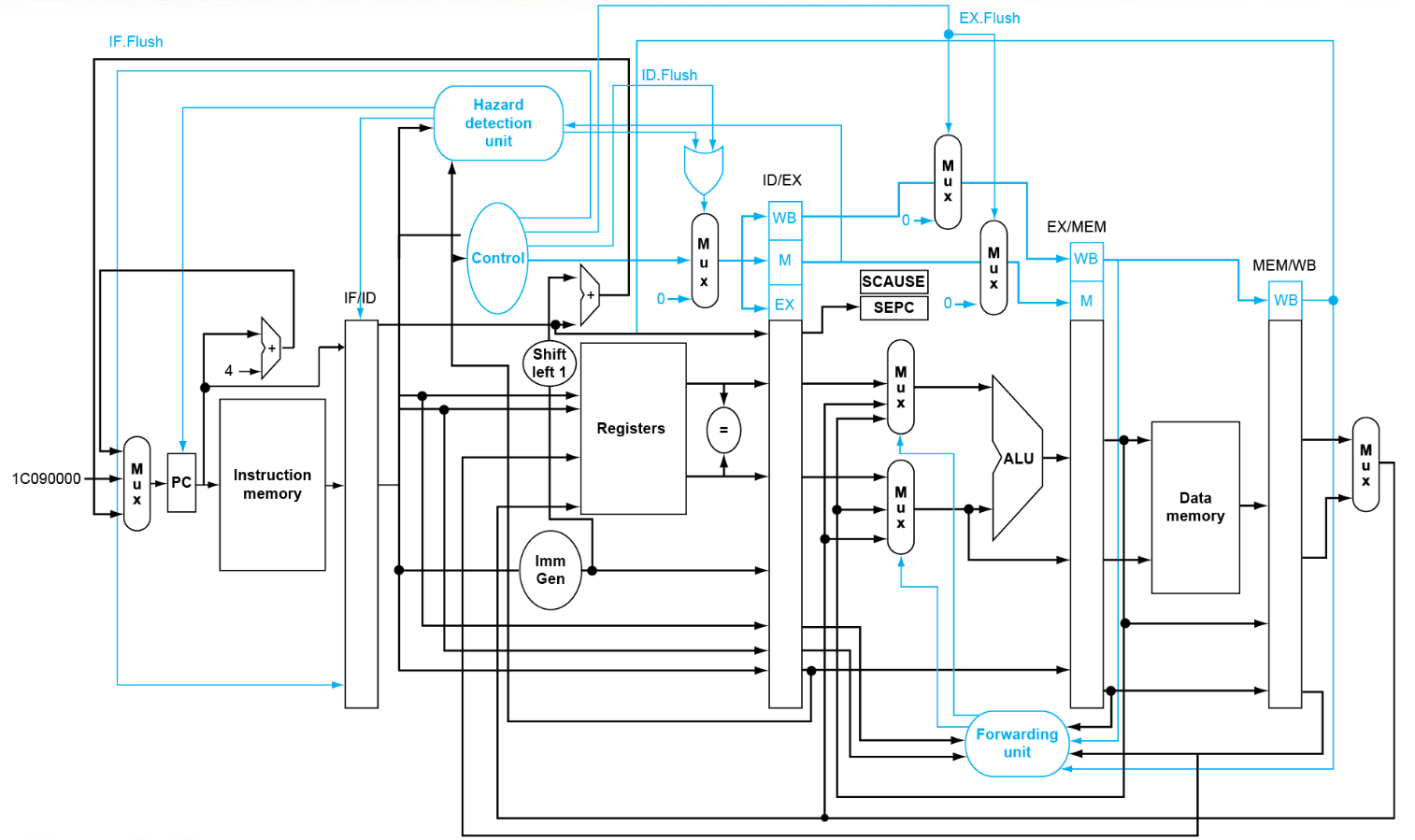
如图所示,增加了'SCAUSE'和'SEPC'寄存器,并在流水线内的寄存器增加了flush信号。
在流水线中,也可能出现多个异常同时发生的情况。
从简单的方法来说,优先处理最早的异常,因为在异常之后的指令可以看作是分支预测错误的,本不应执行。
但是,实际情况远比此复杂。例如,流水线执行指令可能是乱序的,定位到精确的异常原因是很困难的。