索引¶
约 1936 个字 4 行代码 25 张图片 预计阅读时间 10 分钟
Basic Concepts¶
-
索引是一个数据结构,用于加速对数据库表中数据的访问。
-
Search Key: 索引的关键字,用于查找数据。
-
一个Index File包含多个Index Entry,每个Index Entry包含一个Search Key和一个指向数据记录的指针。
Search Key Record Pointer -
有两种索引类型:
-
Ordered Index: 索引条目按顺序排列,适用于范围查询。
-
Hash Index: 索引条目无序排列,适用于等值查询。
-
Index Evaluation Metrics¶
索引的评估指标
-
Access types supported efficiently. E.g.,
-
Point query: records with a specified value in the attribute,点查询
-
Range query: or records with an attribute value falling in a specified range of values,范围查询
-
-
Access time
-
Insertion time
-
Deletion time
-
Space overhead
Ordered Indices¶
Indexes that are ordered by the search key.
有如下的概念:
-
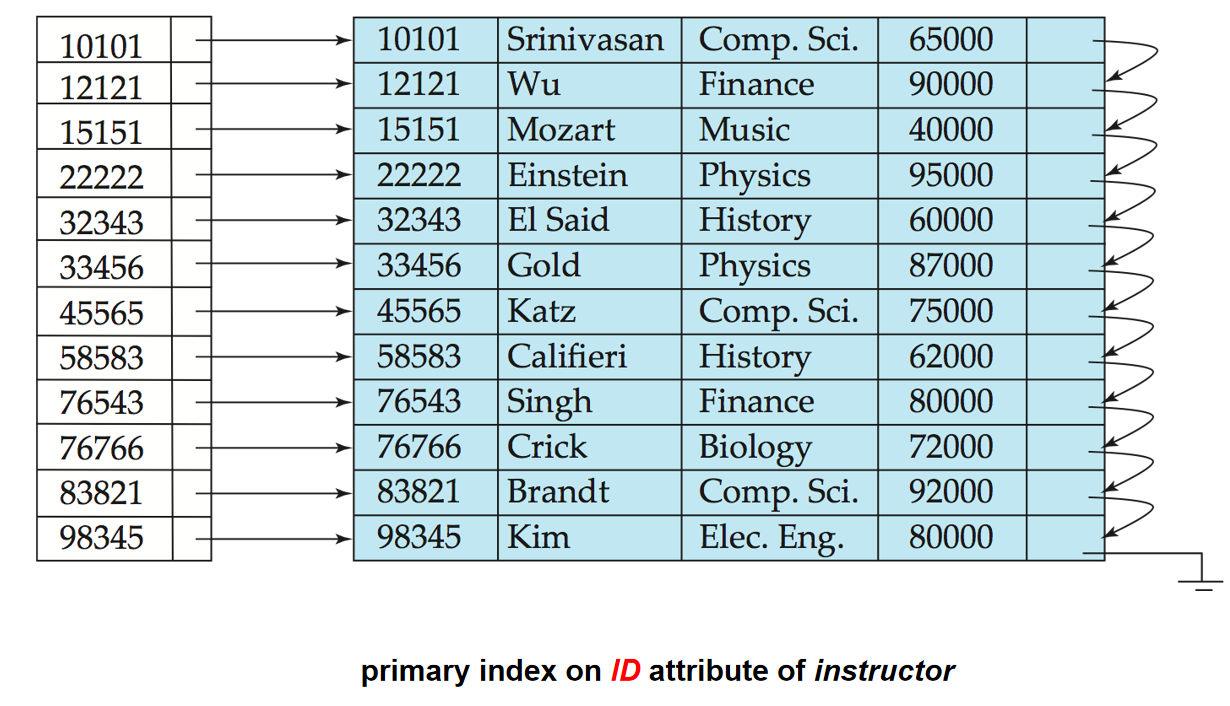
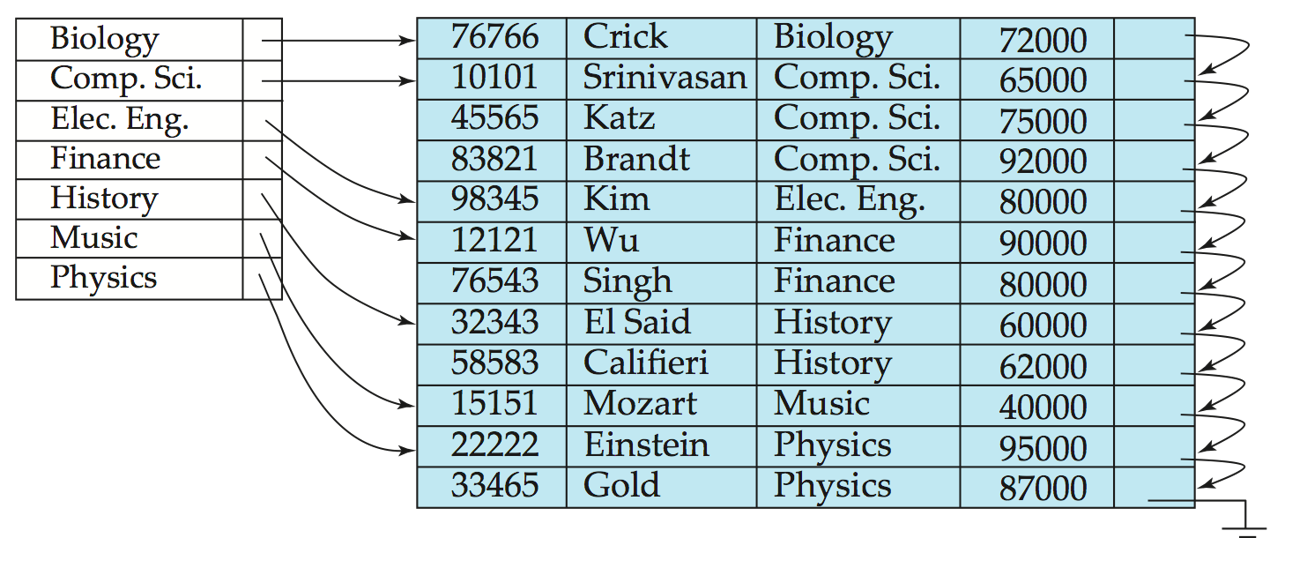
Primary Index(主索引): 也称为clustering index(聚集索引).决定了排列顺序的索引,其Search Key通常,但并不一定,是主键.主索引的记录在文件中是有序的.
-
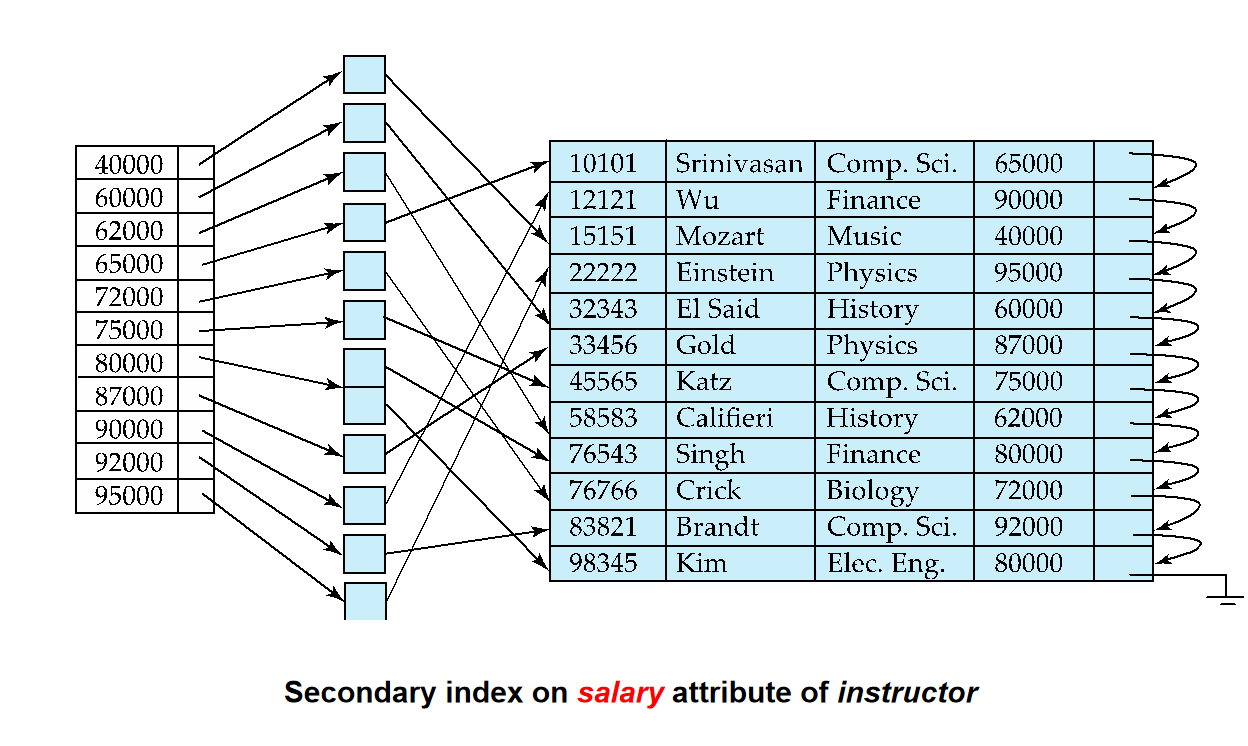
Secondary Index(次索引): 也称为non-clustering index(非聚集索引).它决定的顺序与文件实际排列的顺序不一样.
-
Index-sequential file(索引顺序文件): ordered sequential file with a primary index.
-
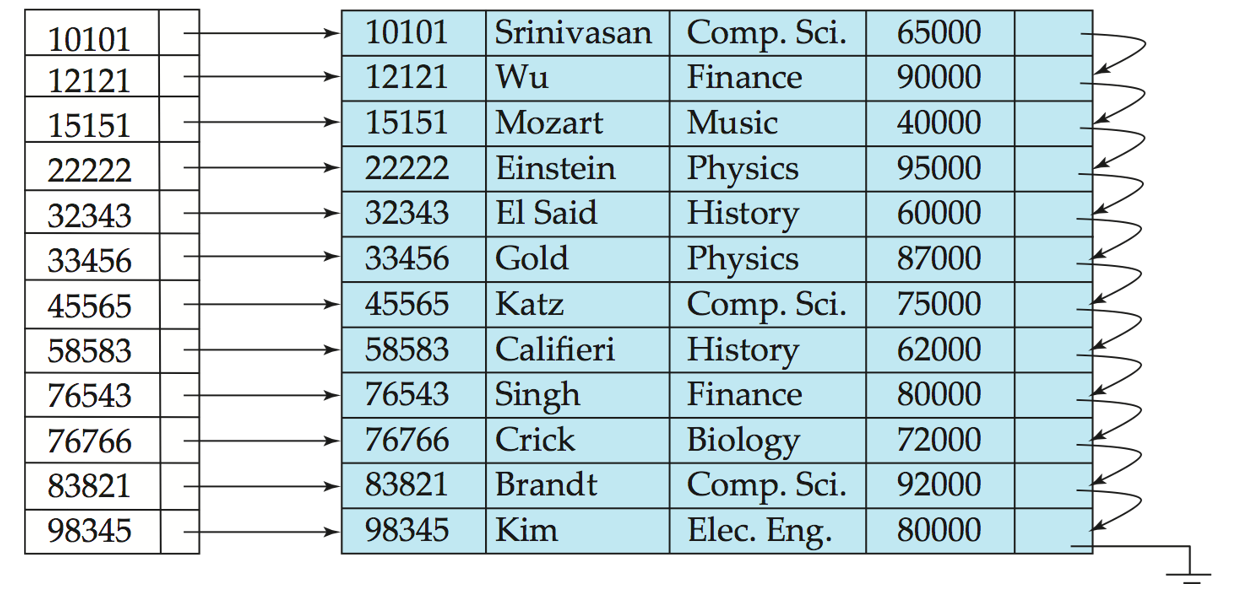
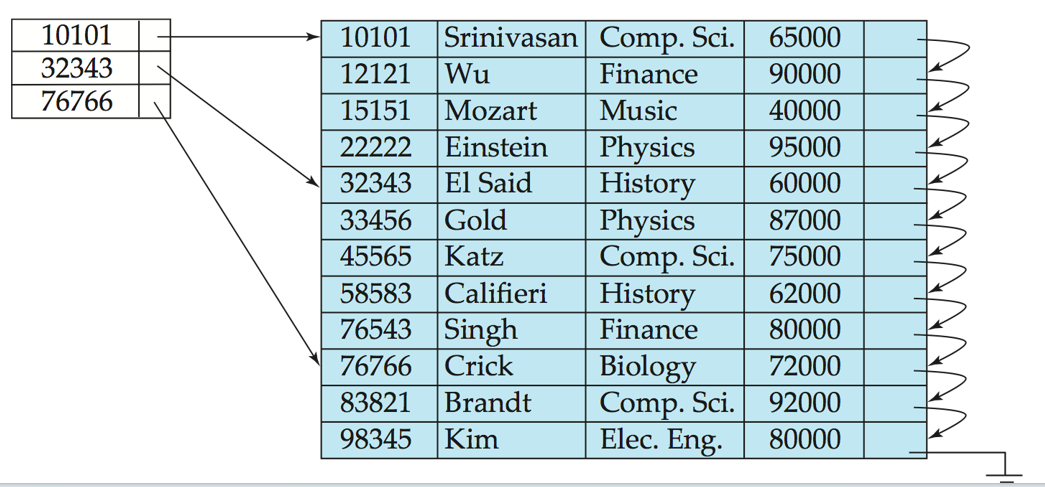
Dense Index Files(稠密索引文件): 所有的Search Key都有一个索引条目.每个索引条目都指向一个数据记录.
稠密索引
稀疏索引
-
Sparse Index Files(稀疏索引文件): 只有一部分Search Key有索引条目.每个索引条目都指向一个数据块.
-
Good tradeoff: sparse index with an index entry for every block in file, corresponding to least search-key value in the block.
-
和B+树有点像.
-
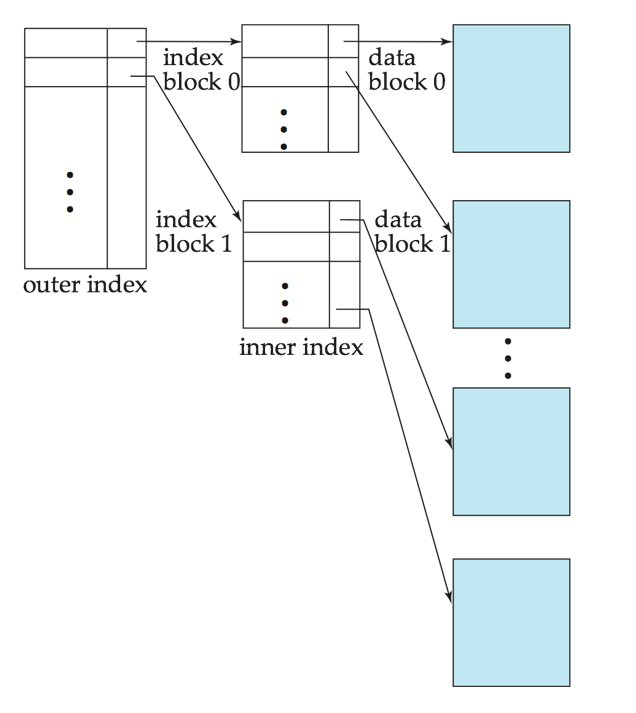
Multilevel Index (多级索引)¶
-
Treat primary index kept on disk as a sequential file and construct a sparse index on it.
-
outer index – a sparse index of primary index
-
inner index – the primary index file
-
B+-Tree Index¶
和ADS一样
一个B+树节点典型的结构如下:

-
\(K_i\)是搜索键的值.通常\(K_1<K_2<...<K_{n-1}\)
-
\(P_i\)是指向下一个节点的指针.如果是叶子节点,那么\(P_i\)指向数据记录.如果是非叶子节点,那么\(P_i\)指向下一个节点.
-
对于叶子节点,\(P_n\)指向下一个叶子节点,也就是下一个数据记录.
Examples¶
由于ADS中已经学过相关操作,所以这里就放一些B+树的例子.
B+ Tree¶
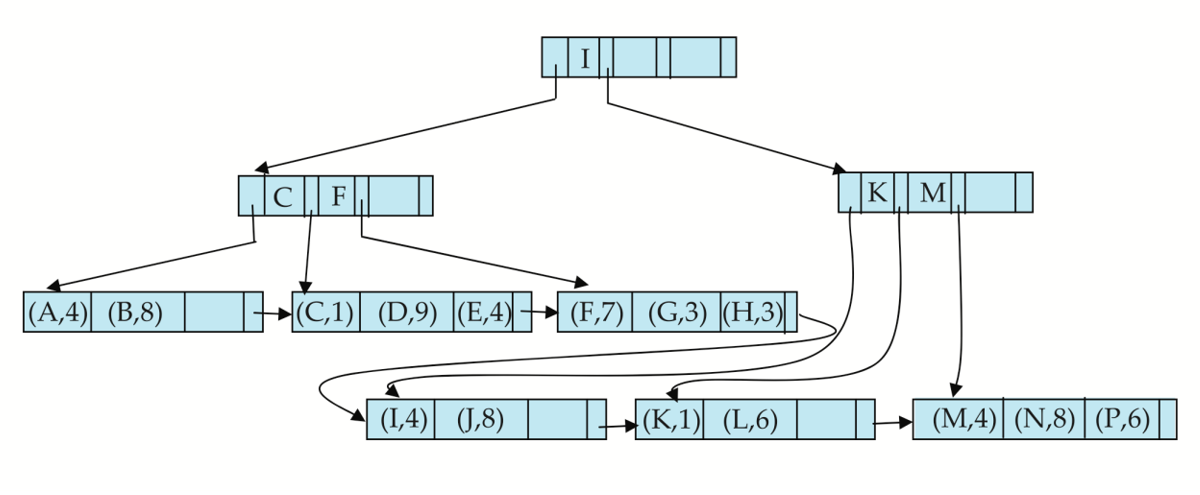
对于下图的B+树:
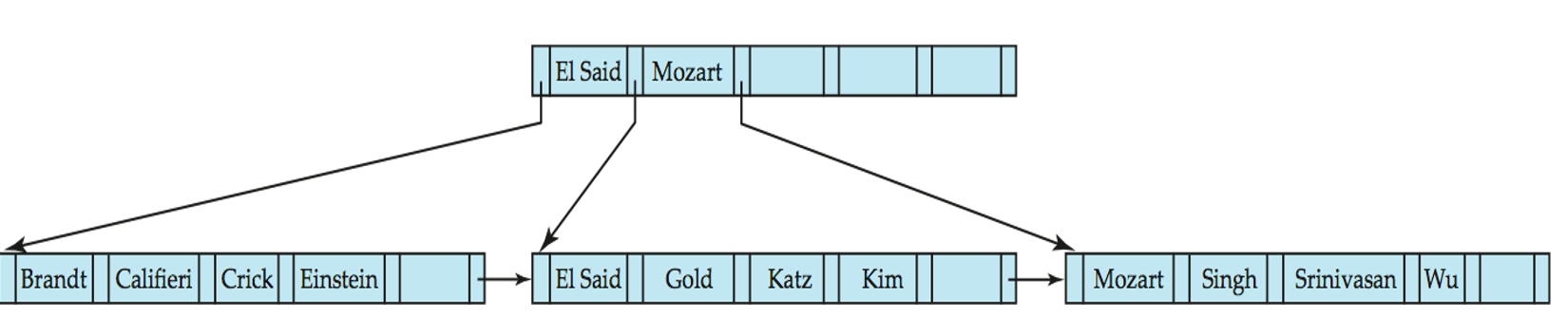
-
其阶数n=6
-
叶子节点的键值数目范围是[3,5] 这里和ADS不一样,是[(n-1)/2,n-1]
-
非叶子节点的孩子数目范围是[3,6]
-
根节点要么是叶子,要么至少有两个孩子
高度结论
如果一个B+树中存储了\(K\)个索引,则其高度的范围是:
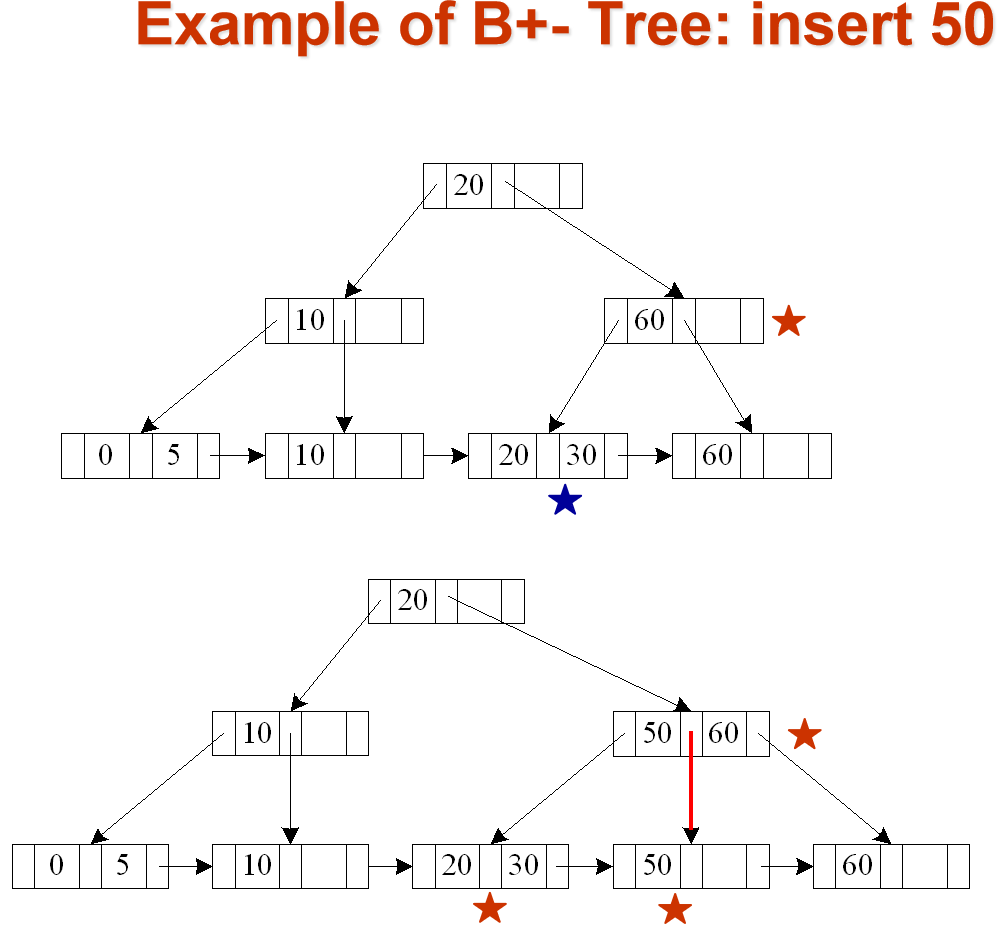
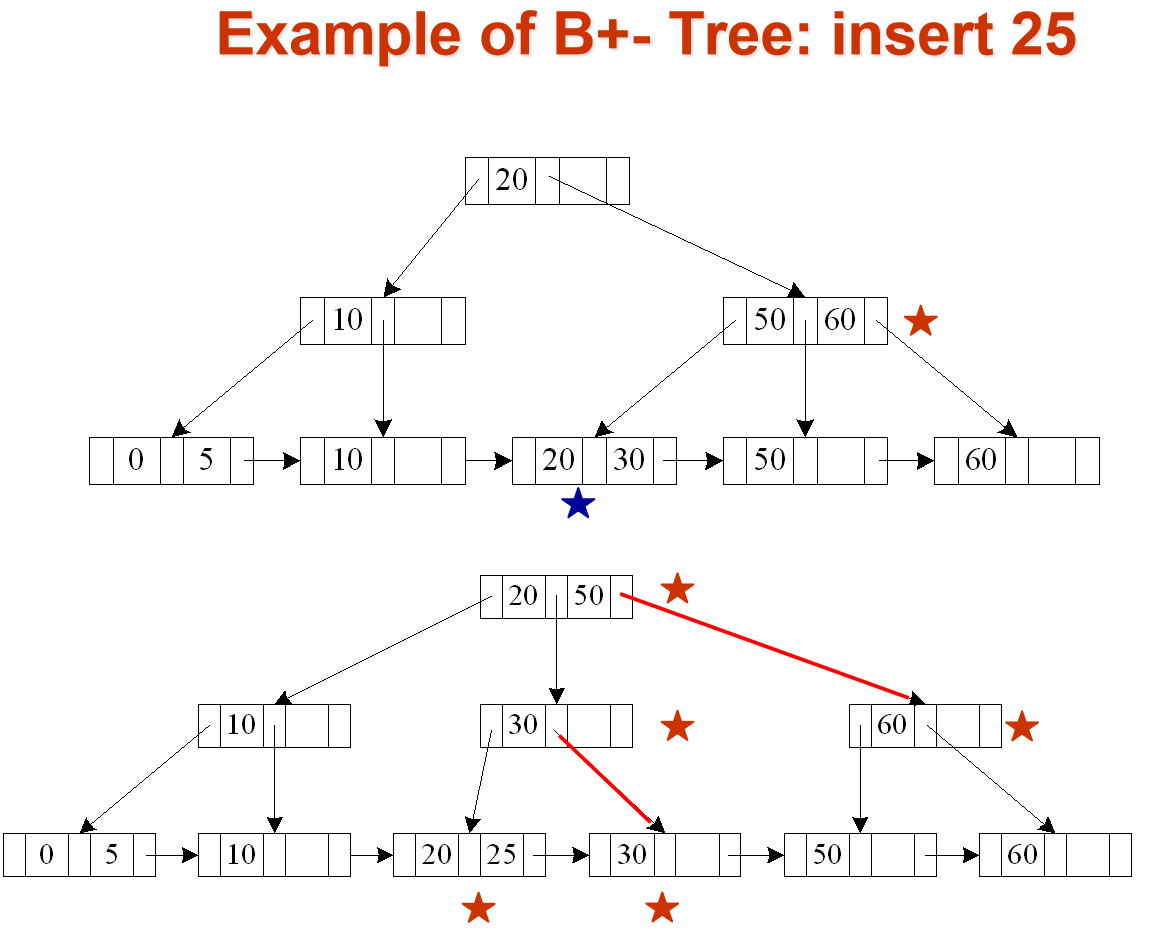
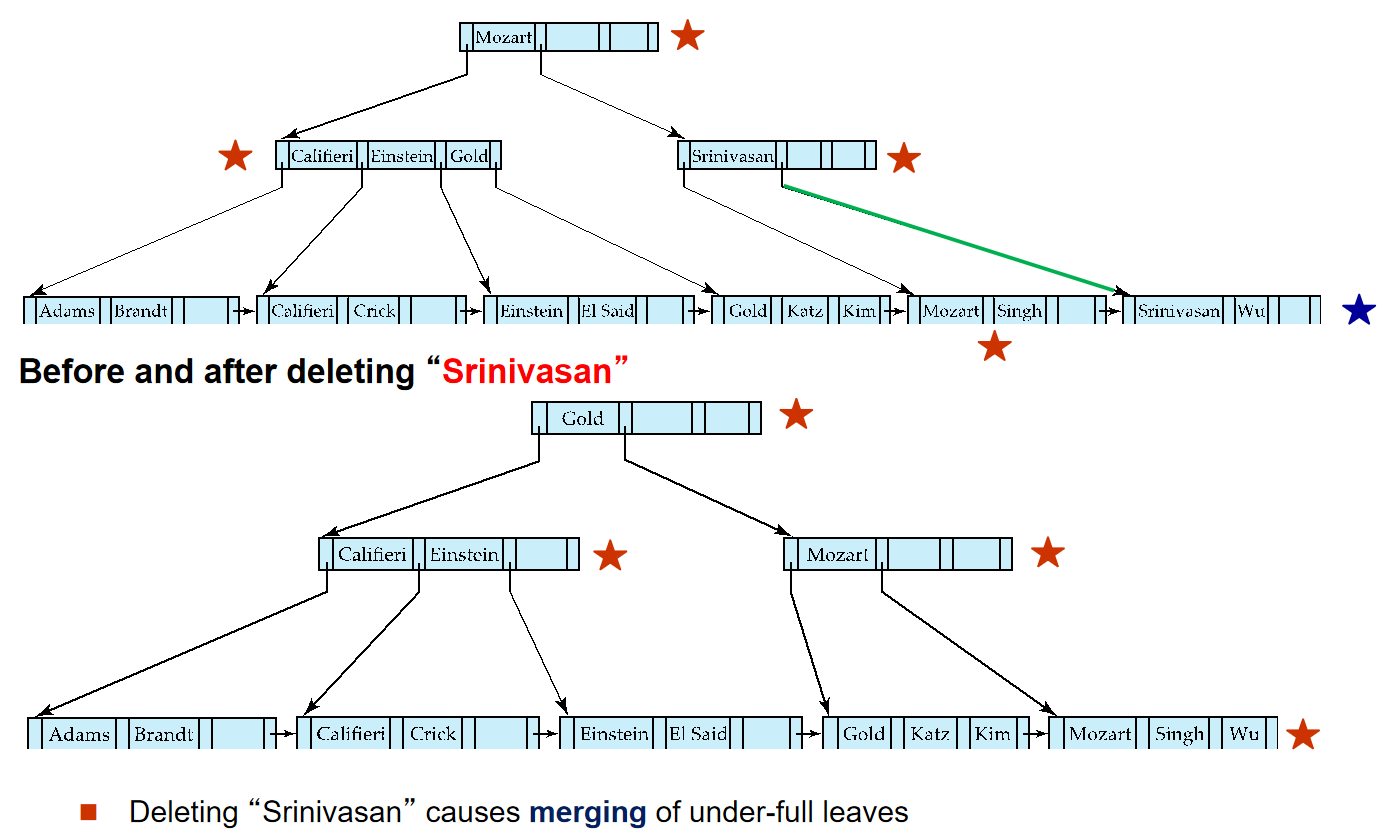
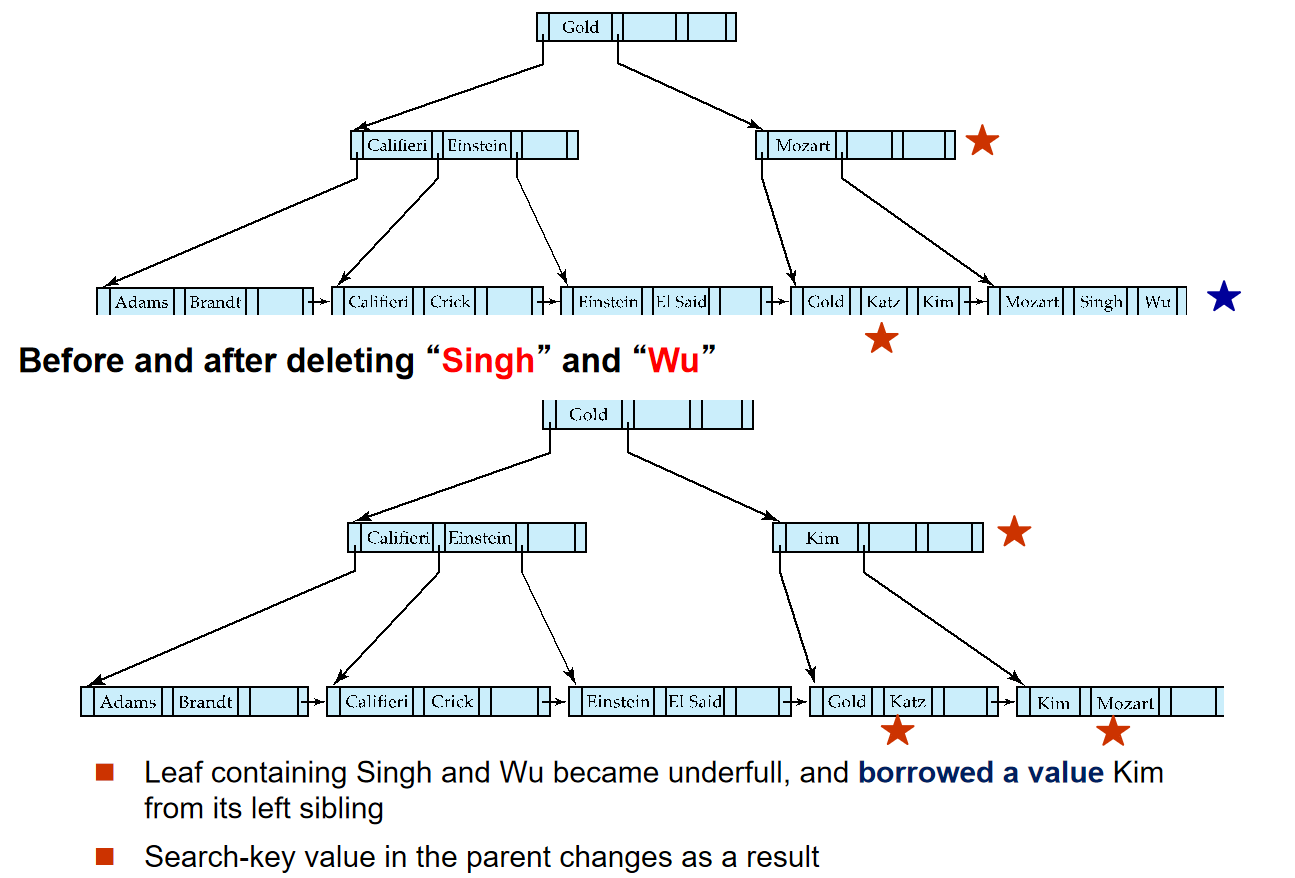
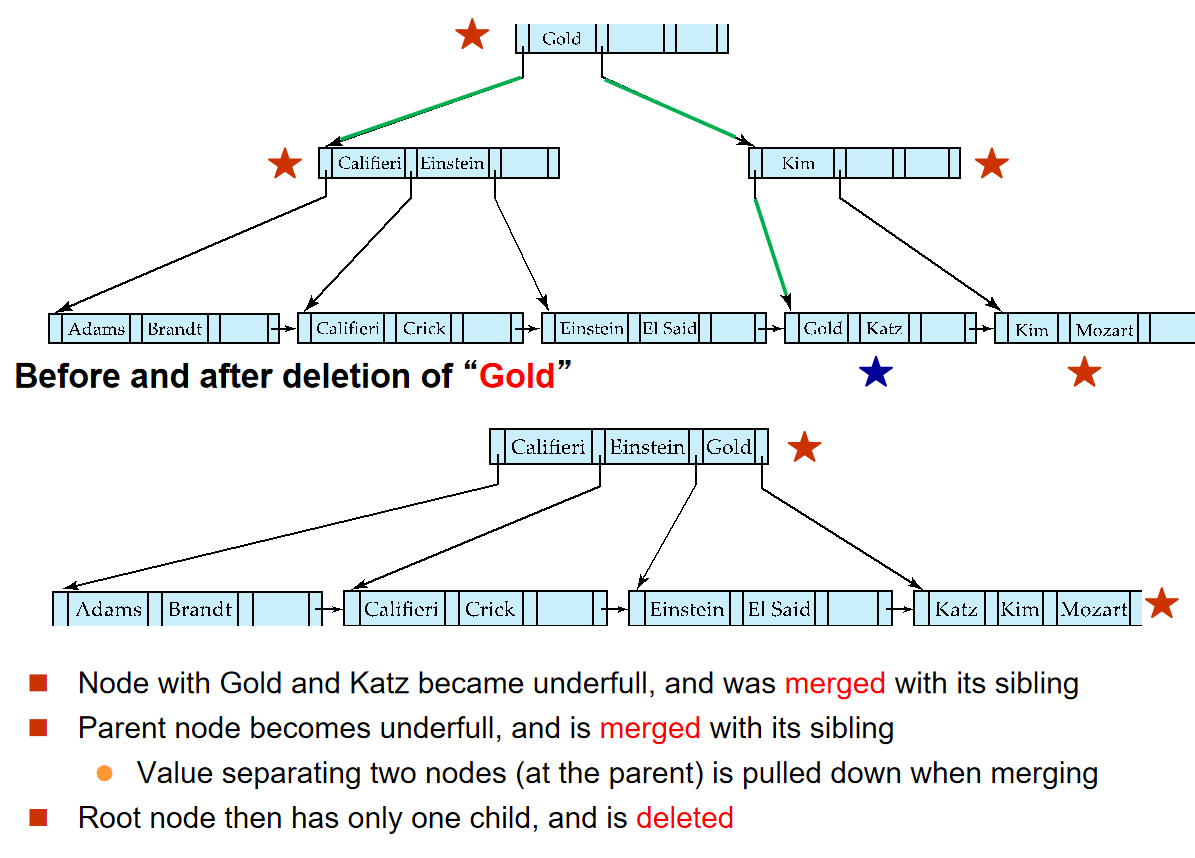
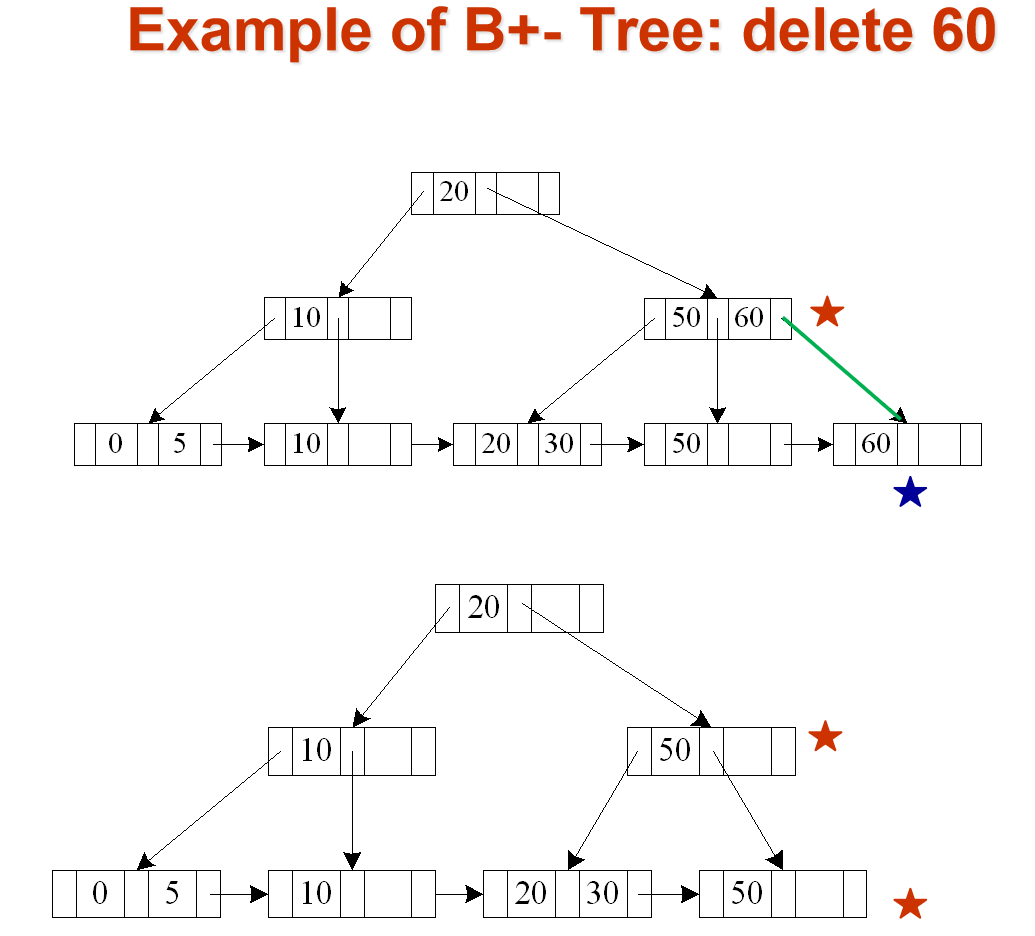
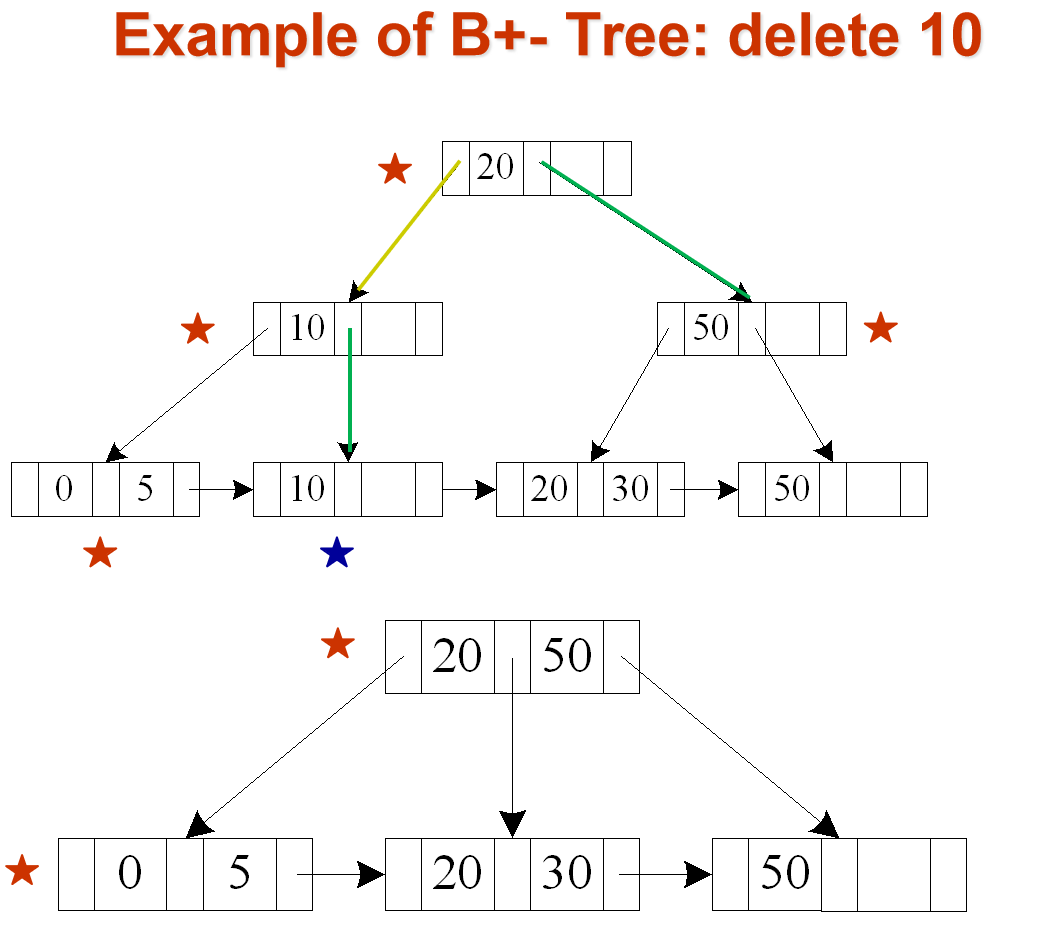
插入与删除¶
所有的例子
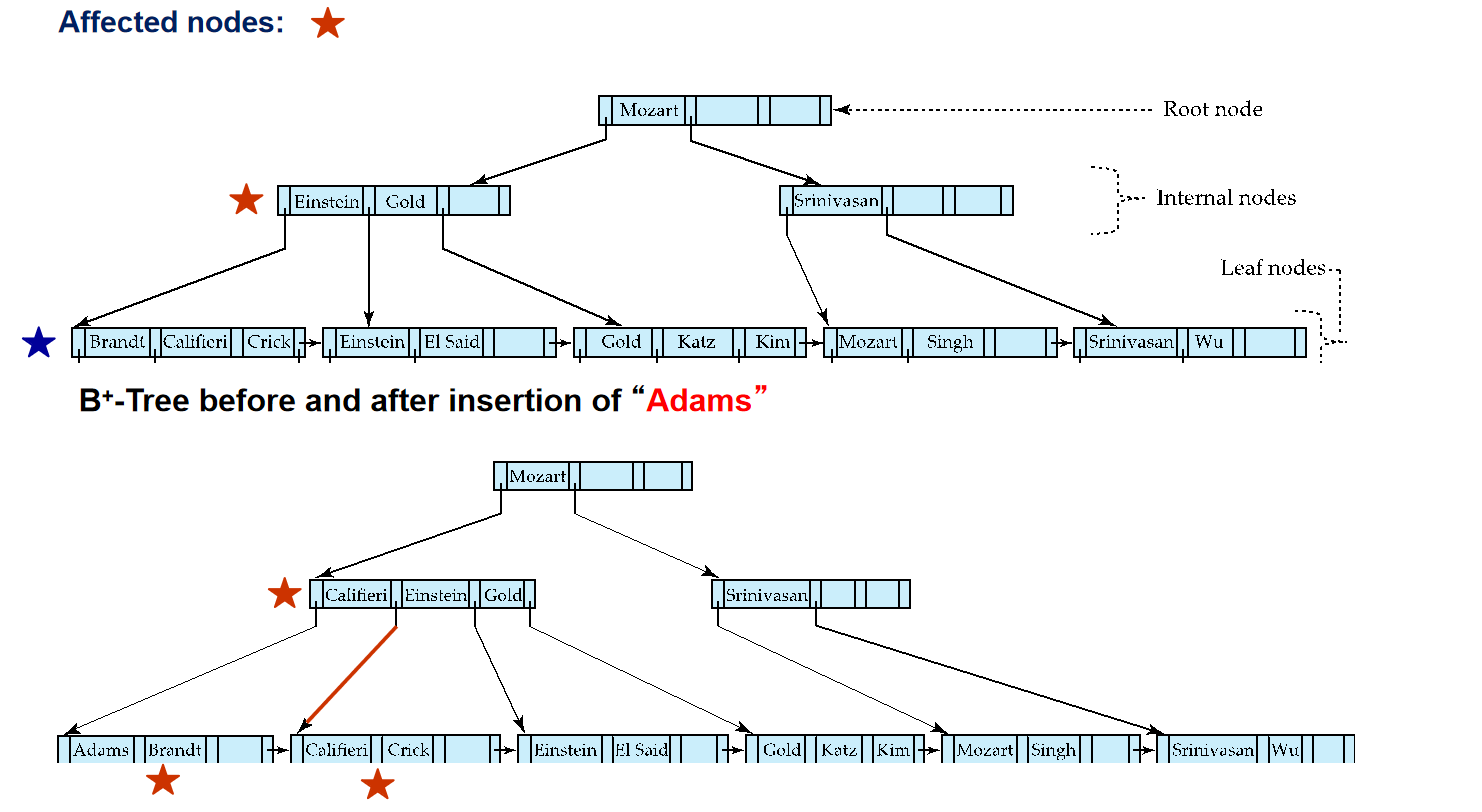
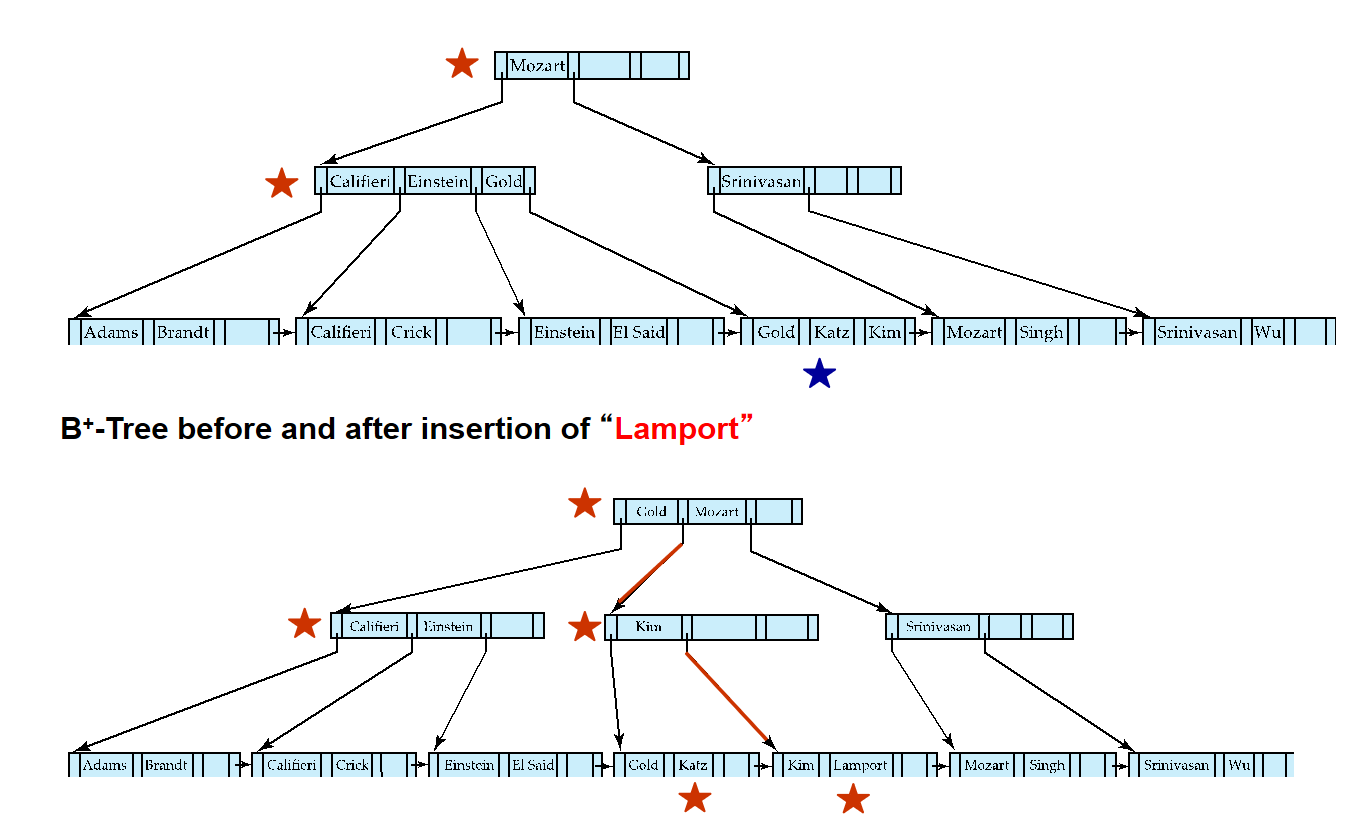
Average node occupancy depends on insertion order
\(\frac{2}{3}\) with random, \(\frac{1}{2}\)with insertion in sorted order
B+- tree : height and size estimation¶
对于如下的数据定义:
与1000000个人相关的记录.
一个block大小4KB,一个指针大小4B,一个char(18)大小18B,一个char(8)大小8B,一个smallint大小2B,一个char(40)大小40B.
因此一个block可以存储的记录数为:
B+树的阶数为:
如果是两层的B+树,那么最多可以存储的记录数为:
如果是三层的B+树,那么最多可以存储的记录数为:
因此我们使用三层的B+树,可以存储下上面这一百万条记录.
一个叶子可以存储[93,186]条记录,一个非叶子节点可以有[94,187]个孩子
-
半满叶节点情况
节点层级 计算值 向上取整 单位 叶节点数 10752.69 10752 nodes 第二层节点数 114 114 nodes 根节点 1 1 node 总节点数(最多) 10867 10867 nodes -
满叶节点情况
节点层级 计算值 向上取整 单位 叶节点数 5376.344 5377 nodes 第二层节点数 29 29 nodes 根节点 1 1 node 总节点数(最小) 5407 5407 nodes
B+ Tree File Organization¶
-
B+-Tree File Organization:
-
Leaf nodes in a B+-tree file organization store records, instead of pointers.存储记录而不是指针
-
Helps keep data records clustered even when there are insertions/deletions/updates
-
-
Leaf nodes are still required to be half full
- Since records are larger than pointers, the maximum number of records that can be stored in a leaf node is less than the number of pointers in a nonleaf node.
Other Issues in Indexing¶
-
Record relocation and secondary indices
-
If a record is relocated, all secondary indices on the record must be updated.
-
这会导致节点的分裂开销十分大
-
解决方法是:在二级索引中不要直接存储记录地址,而是存储该记录的“主键”值,再通过主索引定位记录。
-
-
Variable length strings as keys
- Variable fanout
-
Prefix compression
-
Keys in leaf node can be compressed by sharing common prefixes
-
Keep enough characters to distinguish entries in the subtrees separated by the key value
- E.g. “Silas” and “Silberschatz” can be separated by “Silb”
-
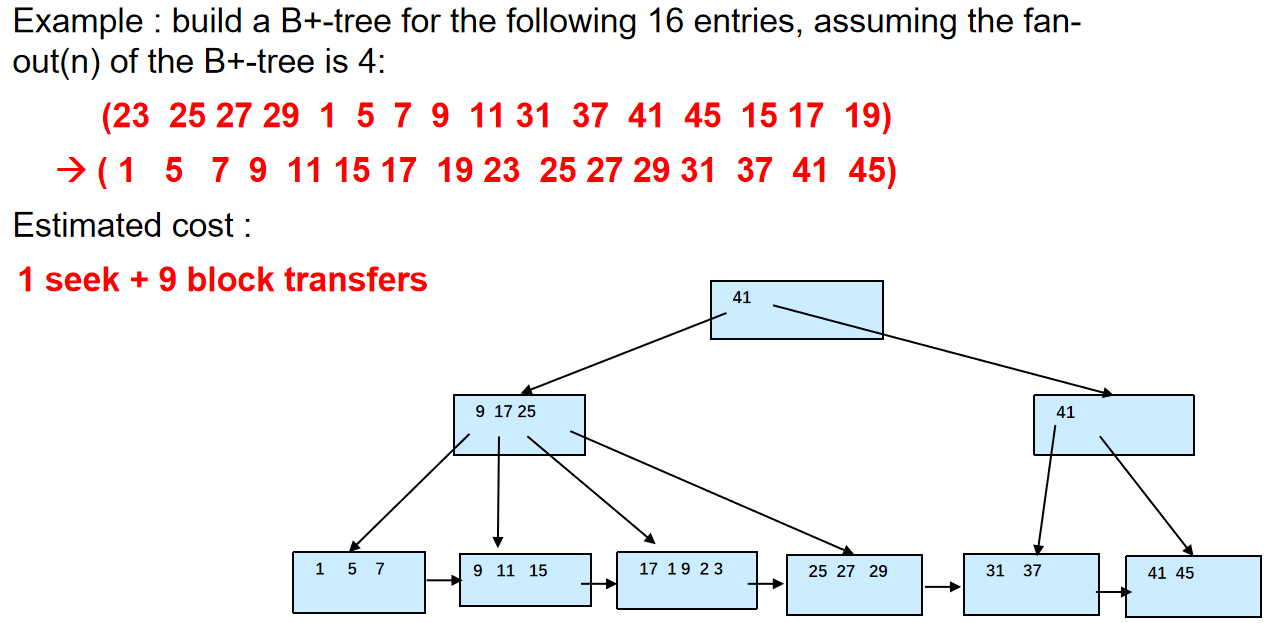
Bulk Loading and Bottom-Up Build¶
批量加载和自底向上构建
Inserting entries one-at-a-time into a B+-tree requires 1 IO per entry
因此,我们有两种解决方法:
-
Insert in sorted order
- 充分利用数据局部性.
-
Bottom-up B+-tree construction
-
和上面一样,先排序
-
然后从底部开始构建B+-树
-
Bulk Loading
Bulk insert index entries¶
Bulk Insert
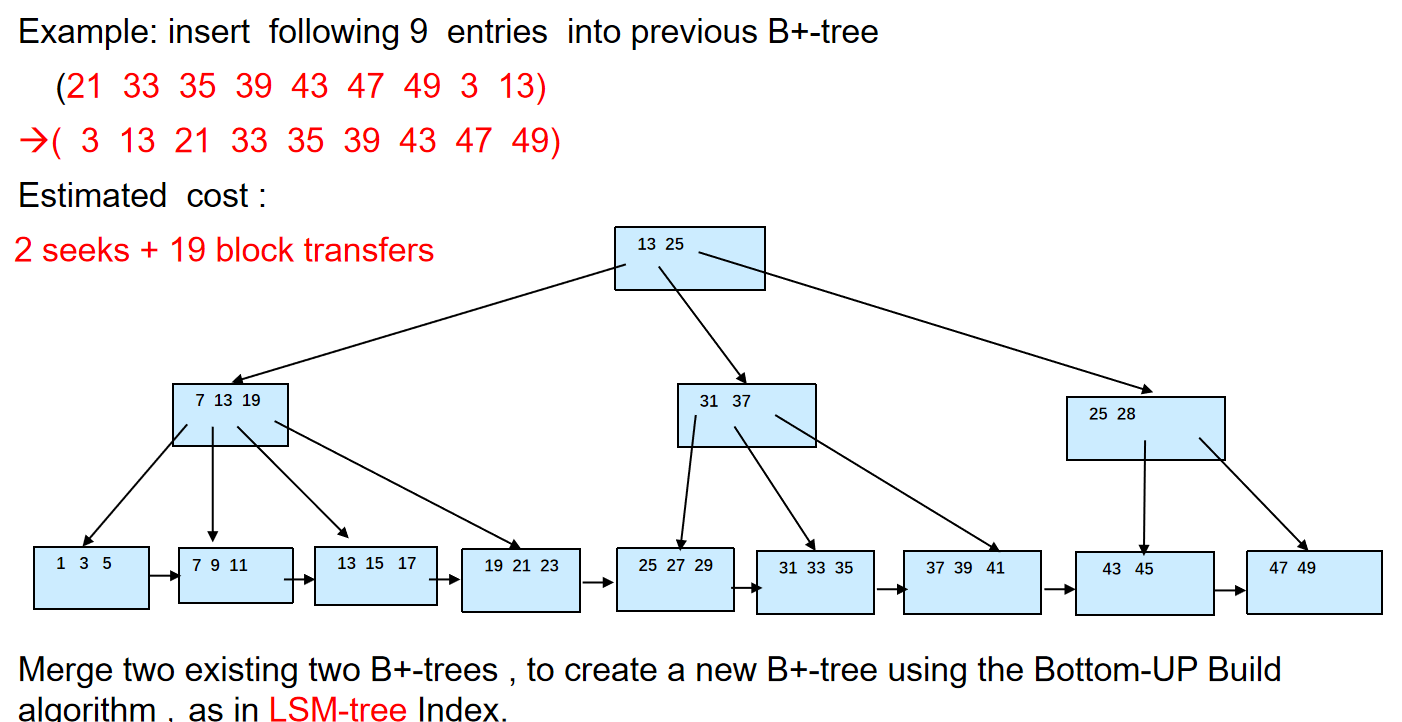
先把之前那颗树的叶子节点找到,1 Seek+6 blocks
然后构建完树后,把树再写回去,1 Seek+13 blocks
Multiple-Key Access¶
-
Composite search keys are search keys containing more than one attribute
- E.g. (dept_name, salary)
-
Lexicographic ordering: (a1, a2) < (b1, b2) if either
-
a1 < b1, or
-
a1=b1 and a2 < b2
-
Indexing in Main Memory¶
当索引结构(如 B+ 树)主要或完全存储在主内存(RAM)中时,我们需要考虑新的性能优化点。
-
内存访问的成本:
- 虽然内存随机访问比磁盘/闪存快得多,但与 CPU 缓存(Cache)相比,仍然相对较慢且存在延迟。
-
大节点与缓存未命中(Cache Misses):
- 传统 B+ 树为优化磁盘 I/O 而设计的大节点,在内存中进行内部查找(如二分查找)时,容易跨越多个block,导致频繁的缓存未命中,降低效率。
-
缓存友好(Cache-Conscious)数据结构:
- 对于内存索引,优化重点转向最大化 CPU 缓存利用率。我们需要设计“缓存友好”的数据结构。
关键思想(Key Idea):
为了平衡磁盘/内存访问和缓存访问的优化:
-
保留大节点: 继续使用较大的 B+ 树节点,以减少磁盘 I/O(如果需要)或整体内存访问(如减少 TLB 未命中)。
-
优化节点内部结构: 不再使用简单的有序数组,而是在大节点内部嵌入一个小的、缓存友好的树结构(例如,节点大小与缓存行匹配的小 B 树)。这样,节点内部的查找操作能更好地利用缓存,减少未命中。
Indexing on Flash¶
在闪存中,写入不是立即的,需要等待原来的数据被擦除后才能写入新的数据。
闪存的随机读取速度远快于磁盘,没有寻道和旋转延迟。因此,读取小页面和大页面的延迟差异远小于磁盘
并且,如果使用大页面,擦除时的代价就会很高。
-
Optimum page size therefore much smaller
-
Bulk-loading still useful since it minimizes page erases
-
Write-optimized tree structures (i.e., LSM-tree) have been adapted to minimize page writes for flash-optimized search trees
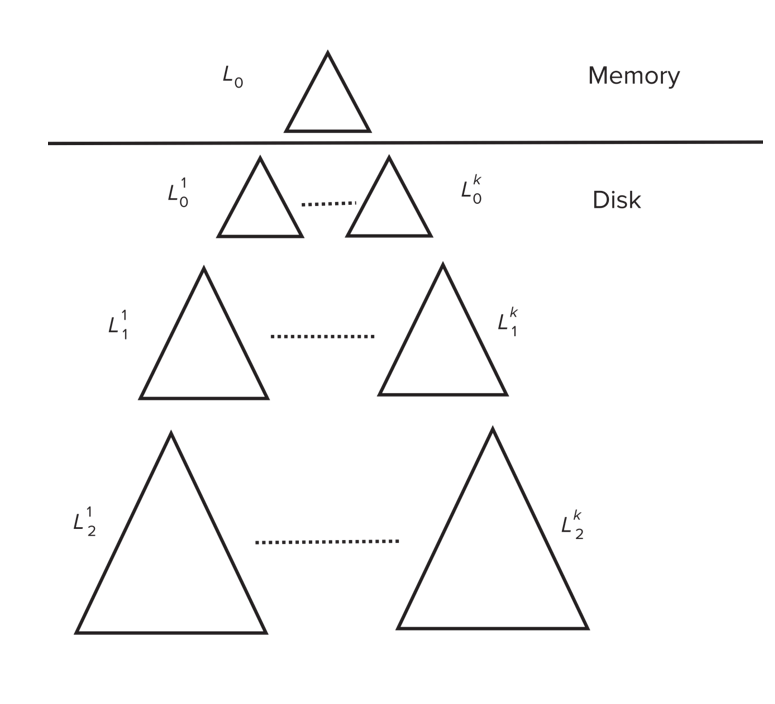
Log Structured Merge (LSM) Tree¶
LSM Tree
LSM树是一种数据结构,旨在优化写入操作的性能。它通过将写入操作首先存储在内存中,然后定期将这些数据批量写入磁盘,从而减少随机写入的次数。

插入数据时:
-
数据块先插入到内存中的\(L_0\)树
-
当\(L_0\)树满了,使用bottom-up build的策略把\(L_0\)树中的数据写入到\(L_1\)树中
-
当\(L_1\)树的大小超过某个阈值,就把它合并到\(L_2\)树中
-
以此类推,有\(L_3\)树,\(L_4\)树,...
Stepped Merge Index¶
当一层上存在k个索引时,把它们合并为下一层的一个树。
布隆过滤器可以用来快速判断一个元素是否在某个集合中。
- 使用一个位数组和多个哈希函数。
- 添加元素时,用哈希函数计算多个位置,并将这些位置的位设为 1。
- 查询元素时,检查其哈希函数对应的所有位:
- 如果所有位都是 1,则报告元素可能存在。
- 如果至少有一位是 0,则报告元素绝对不存在。
Delete¶
在LSM树中,如果我们要删除一个entry,我们就加入一个特殊的delete entry,然后:
-
在查询时,同时查找original entry和delete entry,如果有entry和某个delete entry匹配了,就不返回
-
在合并树时,如果我们找到某个delete entry匹配了某个entry,就把这个这两个entry都删除掉
Buffer Tree¶
Key idea: each internal node of B+-tree has a buffer to store inserts
也就是把B+树每个节点剩下的空间用来存储插入的记录. - 这样可以减少磁盘I/O,因为我们可以把插入的记录先存储在内存中,等到节点满了再写入磁盘.
Bitmap Indices¶
认为一个关系里的一个个元组都是从0开始有序依次编号的
对于每一个属性的每一种值,都有一个bitmap,1表示该元组的该属性为这个值,反之为0.
因此,bitmap使用于那些值比较少的属性,比如性别,国家,城市等.
Bitmap Indices
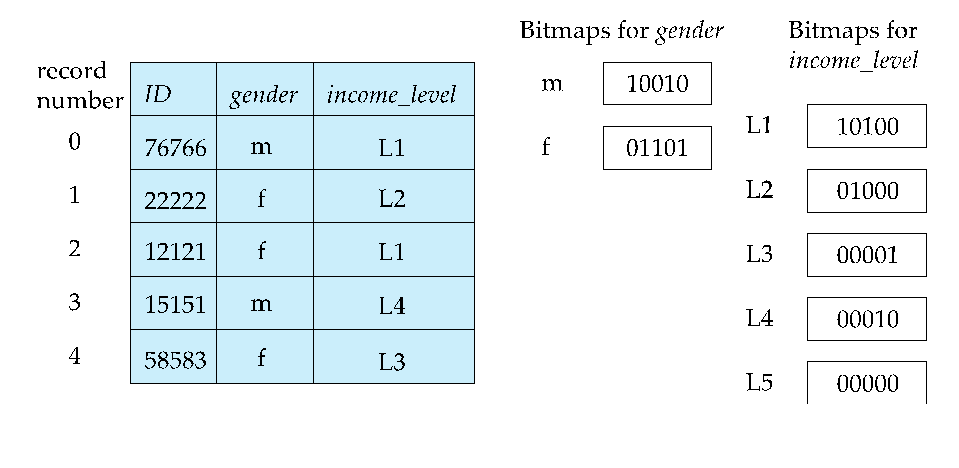
Bitmap Indices对于多值属性的查找非常友好,只要把两个属性值的bitmap做与(and)/或(or)操作就可以了.
-
Bitmaps are packed into words": 位图在内存中不是按单个位存储的,而是被打包成 CPU 的原生字长(Word Size),通常是 32 位或 64 位。这意味着一个 32 位的整数可以存储位图中的 32 个连续位。
-
为了快速知道结果位图中有多少个 1,我们使用如下方法
- 预计算数组: 事先创建一个包含 256 个元素的数组(我们称之为 popcount_lookup)。数组的索引范围是 0 到 255,正好对应一个字节(8 位)能表示的所有可能值。
-
数组内容:
popcount_lookup[i]存储的是整数 i 的二进制表示中包含的 1 的个数。例如:popcount_lookup[0](二进制 00000000) = 0,popcount_lookup[1](00000001) = 1,popcount_lookup[2](00000010) = 1,popcount_lookup[3](00000011) = 2,- ...,
popcount_lookup[255](11111111) = 8
-
将位图按字节(8 位)拆分。对于每个字节,直接以该字节的值作为索引去查预计算数组,就能立刻得到这个字节中 1 的个数。