Principles of Quantum Error Correction
约 1886 个字 3 张图片 预计阅读时间 9 分钟
量子的性质决定了,如果我们想对量子比特进行纠错或者检错,我们不能直接知道量子比特的状态.而是需要借助辅助qubit.
Representation of Quantum Errors
我们可以把环境与系统的演化抽象为两个简单的过程
\[
\begin{aligned}
&|e_0\rangle|0\rangle \rightarrow |e_1\rangle|0\rangle + |e_2\rangle|1\rangle\\
&|e_0\rangle|1\rangle \rightarrow |e_3\rangle|0\rangle + |e_4\rangle|1\rangle
\end{aligned}
\]
我们再简化一步,认为环境和系统是弱耦合的,这意味着:
\[
\sqrt{|\langle e_0|e_1\rangle|^2} \approx \sqrt{|\langle e_0|e_4\rangle|^2} \approx 1,\quad \langle e_2|e_2\rangle, \langle e_3|e_3\rangle \ll 1.
\]
意思就是,弱耦合下,发生错误的概率很低
最后,我们再定义一个统一的投影算符写法:
\[
P_0|\psi\rangle = |0\rangle\langle 0|\psi\rangle, \quad P_1|\psi\rangle = |1\rangle\langle 1|\psi\rangle,
\]
可以统一表示为:
\[
P_\alpha = \frac{I + (-1)^\alpha Z}{2} \qquad (\alpha \in \{0, 1\}).
\]
现在,对于任意的系统状态\(|\psi\rangle = \alpha|0\rangle + \beta|1\rangle\),我们都可以写出演化的过程
Info
考虑任意单比特状态 \(|\psi\rangle = \alpha|0\rangle + \beta|1\rangle\)。
首先写出环境与系统的联合状态演化:
\[
\begin{aligned}
|e_0\rangle|\psi\rangle &= \alpha |e_0\rangle|0\rangle + \beta |e_0\rangle|1\rangle \\
&\rightarrow \alpha \left(|e_1\rangle|0\rangle + |e_2\rangle|1\rangle\right) + \beta \left(|e_3\rangle|0\rangle + |e_4\rangle|1\rangle\right) \\
&= |e_1\rangle (\alpha|0\rangle) + |e_2\rangle (\alpha|1\rangle) + |e_3\rangle (\beta|0\rangle) + |e_4\rangle (\beta|1\rangle)
\end{aligned}
\]
这里我们引入投影算符 \(P_0\) 和 \(P_1\)。注意到:
- \(\alpha|0\rangle = P_0|\psi\rangle\)
- \(\alpha|1\rangle = X P_0|\psi\rangle\) (因为 \(X|0\rangle = |1\rangle\))
- \(\beta|1\rangle = P_1|\psi\rangle\)
- \(\beta|0\rangle = X P_1|\psi\rangle\) (因为 \(X|1\rangle = |0\rangle\))
约定记号 \(|e\rangle O|\psi\rangle \equiv |e\rangle \otimes O|\psi\rangle\),我们可以将上述演化改写为投影算符形式:
\[
|e_0\rangle|\psi\rangle \rightarrow \left[ |e_1\rangle I + |e_2\rangle X \right] P_0|\psi\rangle + \left[ |e_3\rangle X + |e_4\rangle I \right] P_1|\psi\rangle
\]
接下来,我们将 \(P_0 = \frac{I+Z}{2}\) 和 \(P_1 = \frac{I-Z}{2}\) 代入上式中:
\[
\begin{aligned}
|e_0\rangle|\psi\rangle &\rightarrow \left[ |e_1\rangle I + |e_2\rangle X \right] \left( \frac{I + Z}{2} \right) |\psi\rangle + \left[ |e_3\rangle X + |e_4\rangle I \right] \left( \frac{I - Z}{2} \right) |\psi\rangle \\
&= \frac{1}{2} \left[ |e_1\rangle(I + Z) + |e_2\rangle(X + XZ) + |e_3\rangle(X - XZ) + |e_4\rangle(I - Z) \right] |\psi\rangle \\
&= \left[ \frac{|e_1\rangle + |e_4\rangle}{2} I + \frac{|e_1\rangle - |e_4\rangle}{2} Z + \frac{|e_3\rangle + |e_2\rangle}{2} X + \frac{|e_3\rangle - |e_2\rangle}{2} ZX \right] |\psi\rangle
\end{aligned}
\]
算符项合并的反对易说明
在最后一步中,我们利用了泡利矩阵的反对易性质,即 \(XZ = -ZX\),因此可以对交叉项做如下合并与化简:
\[
\frac{|e_2\rangle(XZ) - |e_3\rangle(XZ)}{2} = \frac{-|e_2\rangle(ZX) + |e_3\rangle(ZX)}{2} = \frac{|e_3\rangle - |e_2\rangle}{2} ZX
\]
由于泡利矩阵满足关系 \(ZX = iY\),我们可以将上述演化结果整理为以系统泡利算符 \(\{I, X, Y, Z\}\) 的线性组合:
\[
|e_0\rangle|\psi\rangle \rightarrow \left( |d\rangle I + |a\rangle X + |b\rangle Y + |c\rangle Z \right) |\psi\rangle
\]
其中环境的状态系数分别定义为:
\[
\begin{aligned}
|d\rangle &= \frac{|e_1\rangle + |e_4\rangle}{2} \\
|a\rangle &= \frac{|e_3\rangle + |e_2\rangle}{2} \\
|b\rangle &= i\frac{|e_3\rangle - |e_2\rangle}{2} \\
|c\rangle &= \frac{|e_1\rangle - |e_4\rangle}{2}
\end{aligned}
\]
物理含义
这说明任何量子误差都可以被分解为无误差 (\(I\))、比特翻转误差 (\(X\))、相位翻转误差 (\(Z\)) 以及比特与相位联合翻转误差 (\(Y\)) 的叠加。这也是量子纠错码只需纠正这几种基本的泡利误差的理论依据。
\(X\)为比特翻转:\(X |0\rangle = |1\rangle , X |1\rangle = |0\rangle\)
\(Z\)为相位翻转:\(Z |0\rangle = |0\rangle , Z |1\rangle = -|1\rangle\)
\(Y = iXZ\)
最后,我们可以把结果拓展到多比特:
\[
|e_0\rangle|\Psi_n\rangle \rightarrow |d\rangle|\Psi_n\rangle + \sum_{i=1}^{n} \left( |a_i\rangle X_i |\Psi_n\rangle + |b_i\rangle Y_i |\Psi_n\rangle + |c_i\rangle Z_i |\Psi_n\rangle \right).
\]
Error Correction
在后面的所有讨论中,我们都约定:
原始正确的信息编码是\({|000\rangle,|111\rangle}\)。
考虑一位错误,因此错误的可能就是
\[
{|001\rangle,|010\rangle,|100\rangle,|110\rangle,|101\rangle,|011\rangle,|111\rangle}
\]
对于这样的一位错误,我们可以用如图的电路来检测
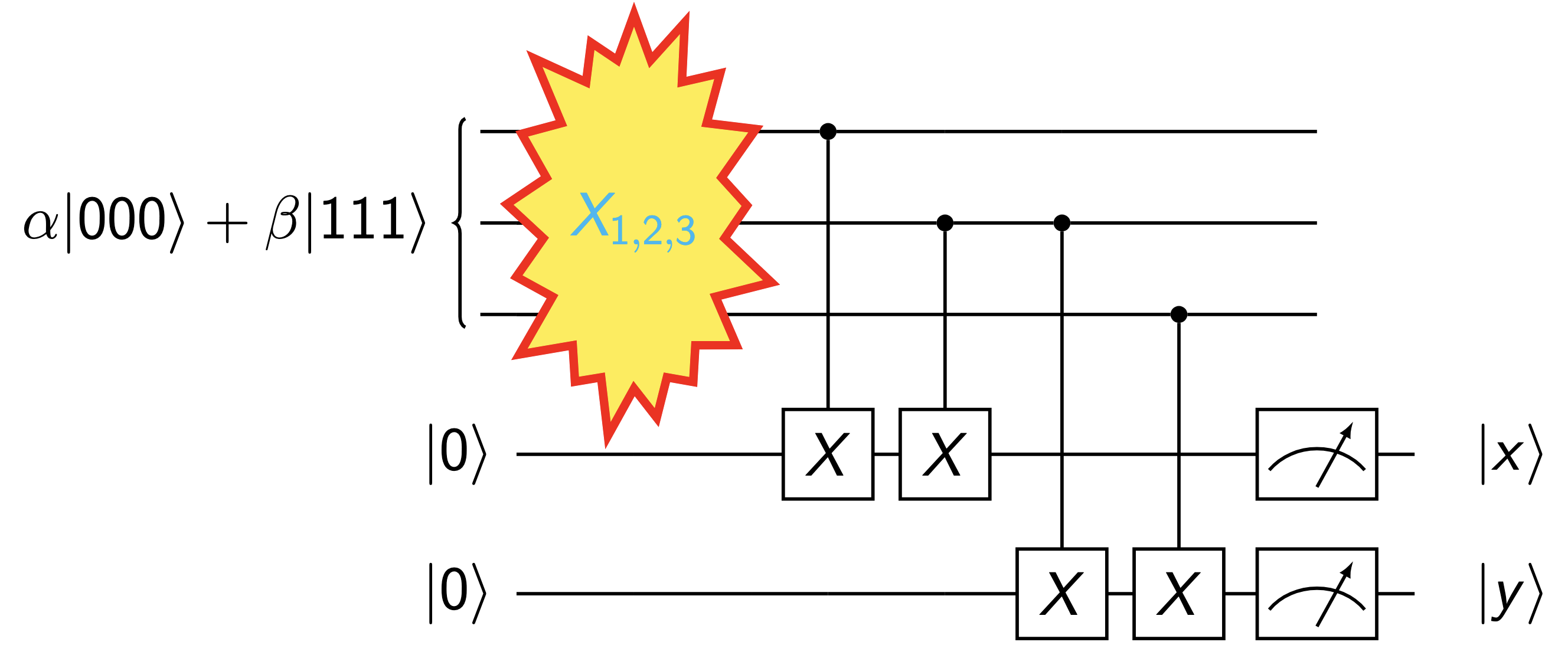
检错电路
我们只要去检测最后的\(|x\rangle,|y\rangle\),就能知道情况是如下四种的哪一种:
-
No error: \(|00\rangle\)
-
\(X_1\): \(|10\rangle\)
-
\(X_2\): \(|11\rangle\)
-
\(X_3\): \(|01\rangle\)
另外,我们甚至可以用\(|x\rangle,|y\rangle\)来实现纠错,电路如图所示:
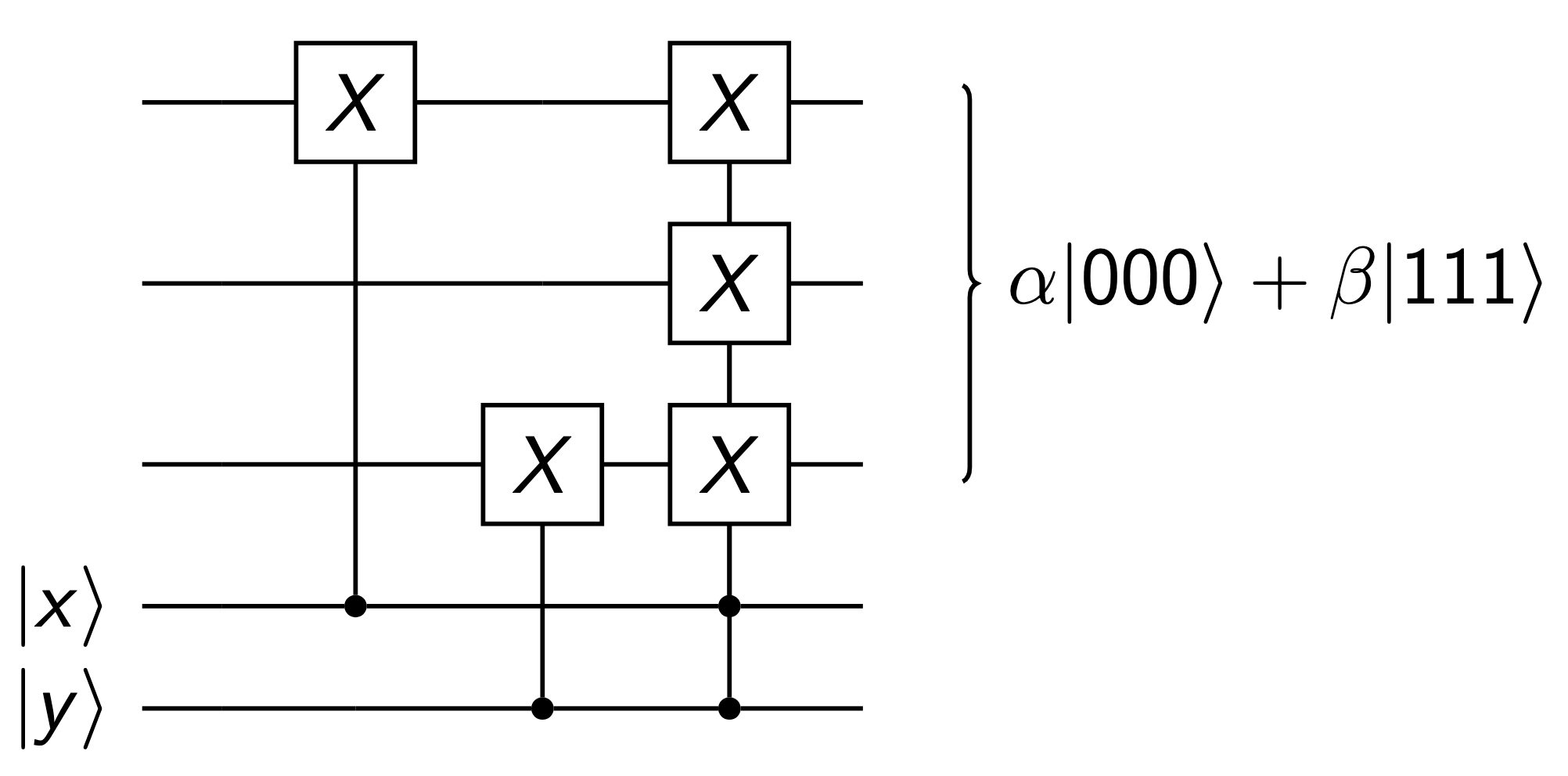
纠错电路
Understanding Error Detection
让我们关注这两个算符:
\[
U_1 = Z_1 Z_2 \hspace{2em} U_2 = Z_2 Z_3
\]
这两个算符具有一个极为重要的特性:它们作用在逻辑量子比特态 \(|\psi\rangle \equiv \alpha|000\rangle + \beta|111\rangle\) 上时,能够保持状态完全不变:
\[
U_1 |\psi\rangle = |\psi\rangle, \qquad U_2 |\psi\rangle = |\psi\rangle.
\]
因为它们稳定了该状态,所以被称为该状态的稳定子(stabilizer)。
- 换句话说,\(U_1\) 和 \(U_2\) 稳定了编码空间(codespace)中的所有状态:
$$
\mathcal{C} = \text{span}{|000\rangle, |111\rangle}.
$$
让我们考虑与编码空间正交的子空间:
\[
\mathcal{F} = \text{span}\{|001\rangle, |010\rangle, |100\rangle, |011\rangle, |101\rangle, |110\rangle\}
\]
被称为非编码空间(non-coding space),即发生错误后系统所处在的子空间。
要检测是否发生了单比特翻转错误,其本质就是要判断当前系统的状态是处于编码空间 \(\mathcal{C}\) 中,还是退化到了非编码空间 \(\mathcal{F}\) 中。为此,我们可以使用如下的投影检错电路来实现:
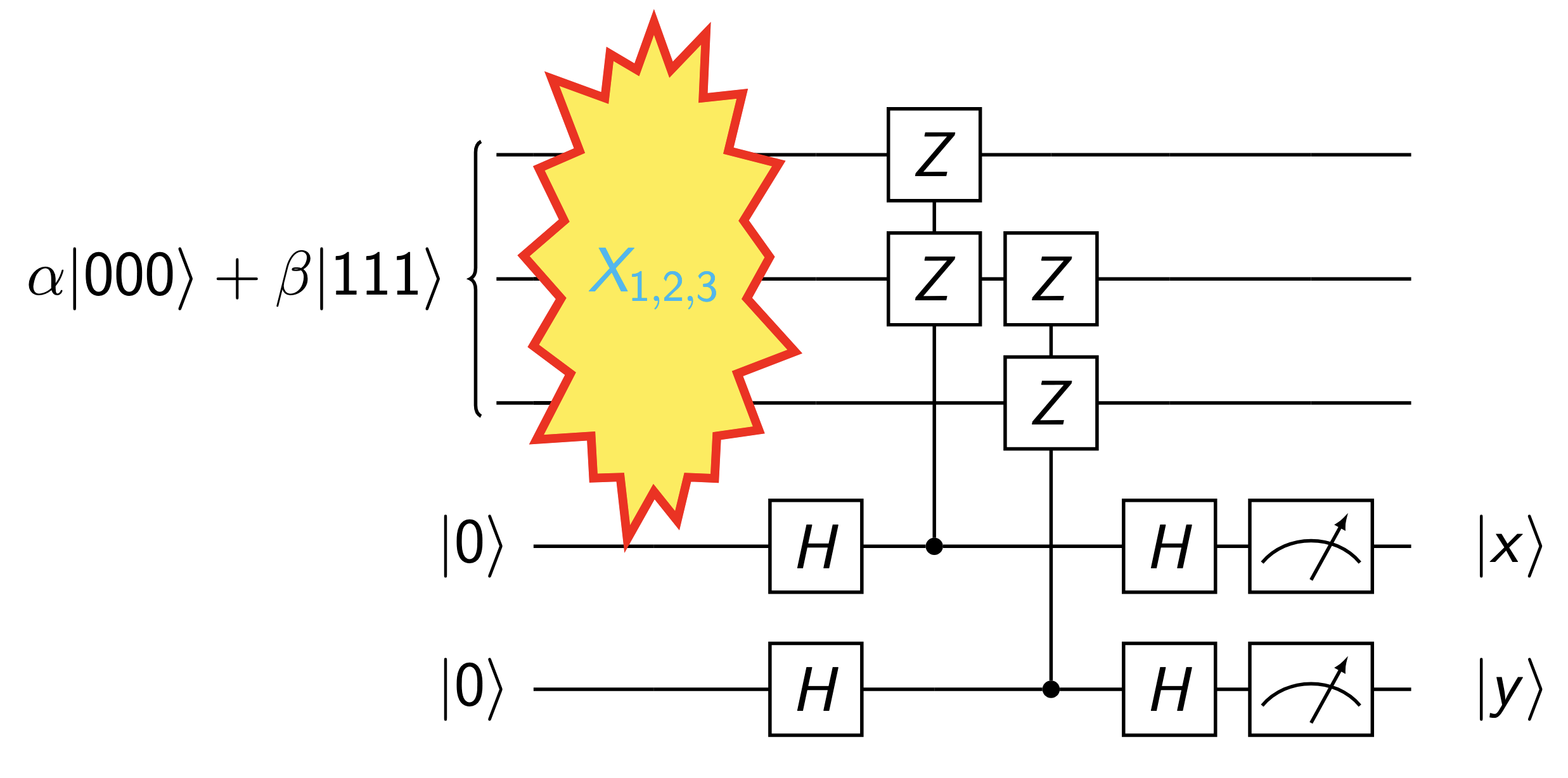
基于辅助比特与控制-U_i 门的投影测量电路
这电路的本质就是对易(commuting)与反对易(anti-commuting)关系。
\(U_i\)与\(X_i\)的对易/反对易关系
当系统在传输或计算中发生了一个误差算符 \(X_j\)(例如第 \(j\) 个比特上发生了比特翻转)时,系统状态会演化为 \(X_j|\psi\rangle\)。由于稳定子具有性质 \(U_i|\psi\rangle = |\psi\rangle\)。此时再去对系统测量 \(U_i\),其状态的本征值演化表现为:
若某个稳定子 \(U_i\) 与发生的误差算符 \(X_j\) 反对易(即满足 \(U_i X_j = -X_j U_i\)),那么当我们在误差发生后测量稳定子 \(U_i\) 时:
\[
U_i \left( X_j |\psi\rangle \right) = -X_j U_i |\psi\rangle = -X_j \left( U_i |\psi\rangle \right) = -X_j |\psi\rangle
\]
这表明受损后的状态 \(X_j|\psi\rangle\) 变成了 \(U_i\) 的 \(-1\) 本征态。因此,我们在投影测量 \(U_i\) 时,必定会以 \(100\%\) 的概率测得本征值 \(-1\)!这也代表我们成功检测到了误差的存在。
若稳定子 \(U_i\) 与发生的误差算符 \(X_j\) 对易(即满足 \(U_i X_j = X_j U_i\)),那么当我们在误差发生后测量 \(U_i\) 时:
\[
U_i \left( X_j |\psi\rangle \right) = X_j U_i |\psi\rangle = X_j |\psi\rangle
\]
这表明受损状态仍然是 \(U_i\) 的 \(+1\) 本征态。因此,投影测量 \(U_i\) 时,测得的本征值依旧为 \(+1\)。
\(U_i\)与\(x_j\)反对易的条件是,它们在奇数个比特位上的算子不同,且都不是单位算符.
例如\(U_1 = Z_1 Z_2 I_3\),它与\(X_1 I_2 I_3\)反对易.